
 Thai
Thai


















MECHA
เทคโนโลยี Mechatronics
ภาพด้านล่างนี้แสดงตัวอย่างลาดับสถานะการทางานของระบบขับเคลื่อนที่ซึ่งใช้ ร่วมกันระหว่างกริปเปอร์ อุปกรณ์ขับเร้า และหัวแบ่งไฟฟ้ า 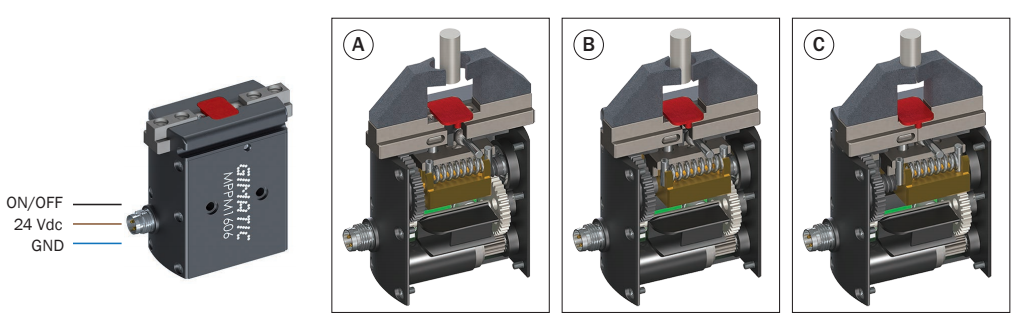
ผู้ ใช้สามารถระบุสถานะเหล่านี้ได้ ในโปรไฟล์ดูดซับพลังงานของมอเตอร

คอธิบำยกำรใช้งำน
เมื่อเวลาเป็ น T0 สัญญาณนาร่องจะเปลี่ยนสถานะจาก ON เป็ น Off ทาให้แขน หุบลง ในขณะเวลา DTA มอเตอร์จะเริ่มทางาน ในขั้นตอน A จะทาให้สปริงยืดตัว ซึ่ง ตอนแรกจะถูกกดเอาไว้ ในขั้นตอน B สปริงจะเข้าสู่ความยาวอิสระ และแขนจะขยับด้วยความเร็วคงที่ จนกว่าจะสัมผัสกับชิ้นงานที่เวลา T2
ในขั้นตอน 3 แขนจะสัมผัสกับชิ้นงาน และสปริงจะเริ่มบีบตัว
เมื่อเวลาเป็ น T3 มอเตอร์จะหยุดทางานและระบบส่งกาลังแบบไม่ย้อนกลับจะคง การหยิบจับไว้แม้ ไม่ ได้เปิ ดเครือง จนกว่าจะมีคาสั่งให้เปิ ดแขนครั้งต่อไป (สถานะ ON)

เวอร์ชัน PNP/NPN
มีกริปเปอร์ ให้ ใช้ ในเวอร์ชันมาตรฐานที่มีอินพุต PNP และเวอร์ชัน N ที่มีอินพุต NPN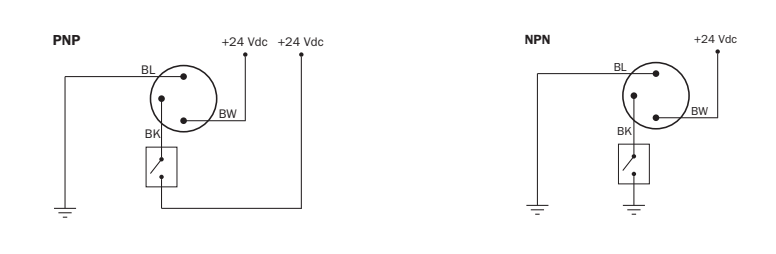
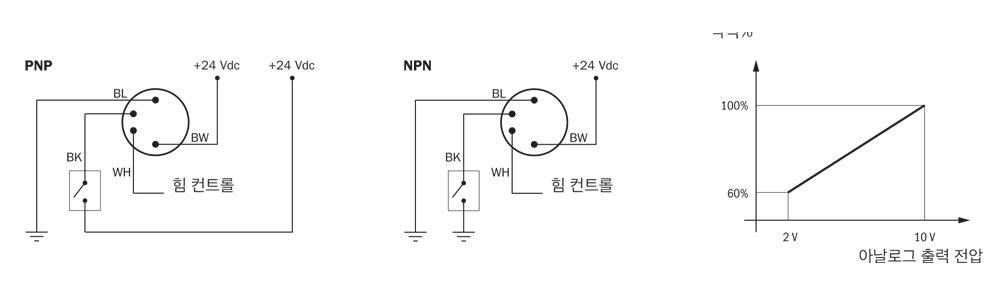
กำรควบคุมแรง (เวอร์ชัน 4 พิน)
สาหรับรุ่นต่างๆ ที่มีตัวเชื่อมต่อ M8 แบบ 4 พิน บางเวอร์ชันจะมี ให้ ใช้พร้อมช่อง สัญญาณอินพุตแบบอะนาล็อก การเปลี่ยนแรงดันไฟฟ้ าอ้างอิงในช่วง 2÷10 V ทาให้ ผู้ ใช้สามารถปรับแรงหยิบจับได้ ค่าแรงดันไฟฟ้ าที่ตา่ กว่า 2 V จะทาให้อุปกรณ์หยุด ทางาน ทาให้สร้างเครืองจักรได้อย่างปลอดภัย
เอำต์พุตสูงสุด
Îในรุ่นต่างๆ ที่มีตัวเชื่อมต่อ M8 แบบ 4 พิน บางรุ่นจะมาพร้อมกับช่องสัญญาณ เอาต์พุตแบบดิจิทัล ซึ่งเปิ ดใช้งานอัตโนมัติ โดยอุปกรณ์เมื่อแขนออกแรงหยิบจับ โดยจะทางานเหมือนเป็ นเซ็นเซอร์วัดระยะแบบผสาน ซึ่งสามารถทางานได้อิสระใน ตาแหน่งสุดท้ายของแขน และดังนั้นจึงไม่มีการปรับ
เอำต์พุตตแหน่งและ Fieldbus
ในเร็วๆ นี้จะมีเวอร์ชันที่มีช่องสัญญาณเอาต์พุต (แบบดิจิทัลและ/หรืออะนาล็อก) เฉพาะสาหรับการวัดตาแหน่งแขนจับให้ ใช้งาน รวมถึงเวอร์ชันที่กาหนดค่าไว้ สาหรับการสื่อสารที่อิงตาม Fieldbus แบบดิจิทัล


