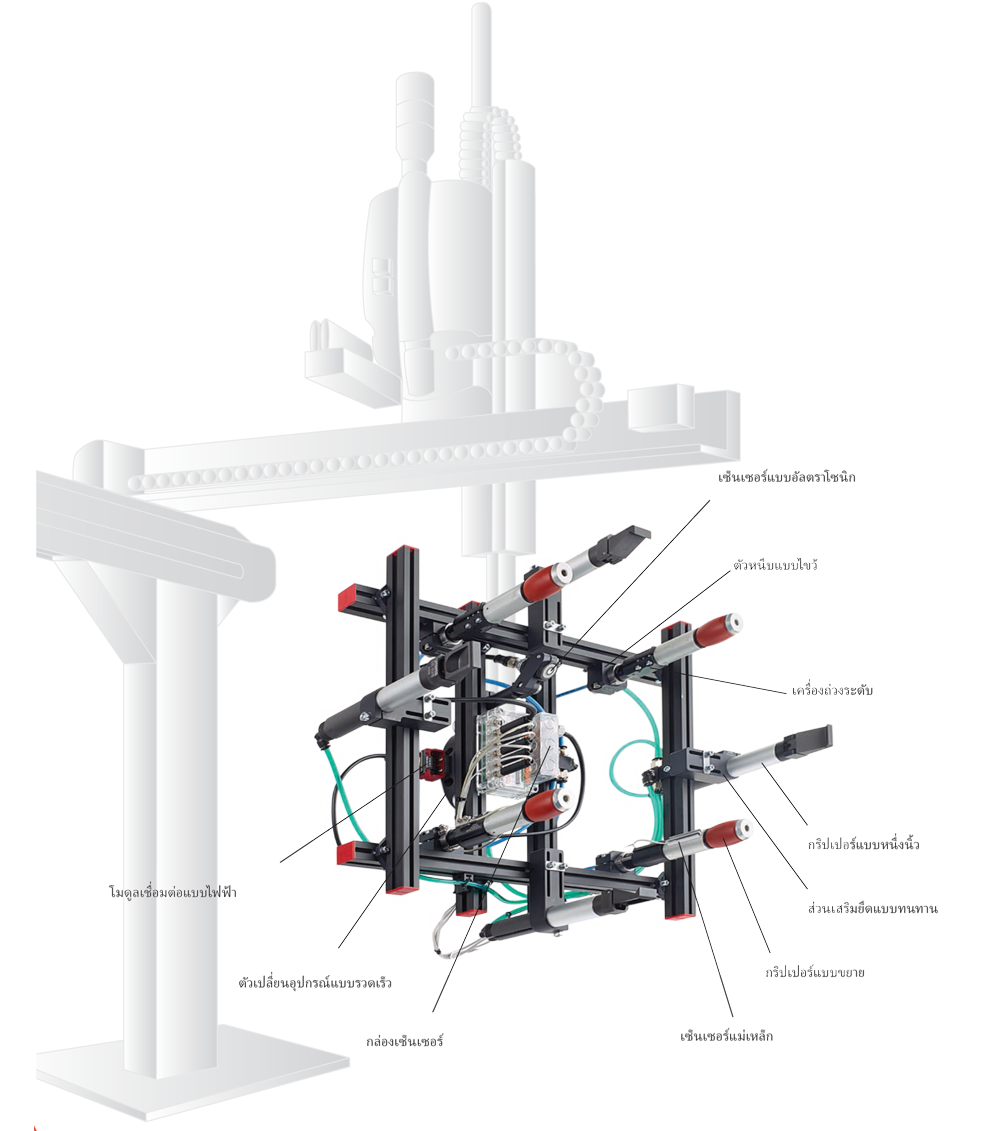
อุปกรณ์ติดปลายแขนหุ่นยนต
EOAT คืออะไร
EOAT เป็ นโครง (พร้อมเครืองมือทุกอย่างที ่ ่จเป็ น) ที่ติดตั้งบนหุ่นยนต์สาหรับการ ขนย้ายของออกจากเครืองฉีดขึ ่ นรูปพลาสติก ้ โดยมีหน้าที่ ดังนี้
- นาส่วนทีขึ ่ น้ รูปแล้วออกจากแม่พิมพ
- หนีบเอาไว้ ให้แน่น
- แยกส่วนทีขึ ่ น้ รูปออกจากแกนหัวฉีด
- จับหัวฉีดหลังจากการตัด
- หย่อนหัวฉีดลงในเครือง ่ รี ไซเคิล
- ขนย้ายส่วนทีขึ ่ น้ รูปวางบนพาเลตหรือสายพาน
End of Arm
QC
- ตัวเปลียน ่ อุปกรณ์แบบรวดเร็วเพื่อ การเชื่อมต่อที่ง่ายระหว่างหุ่นยนต์ กับ EOAT
- มี 15 รุ่น และ 5 ขนาดทีบรร ่ ทุกนา หนักได้มากถึง 75 กิ โลกรัม
- การเชื่อมต่อแบบนิวแมติกและแบบ ไฟฟ้ า
- วาล์วระบายอากาศ
- ตัวล็อกตัวเปลียน ่ อุปกรณ์แบบรวดเร็ว เพื่อความปลอดภัย
- การระบุความถีค่ ลืน่ วิทยสุ าหรับการ ระบุชนิดของ EOAT
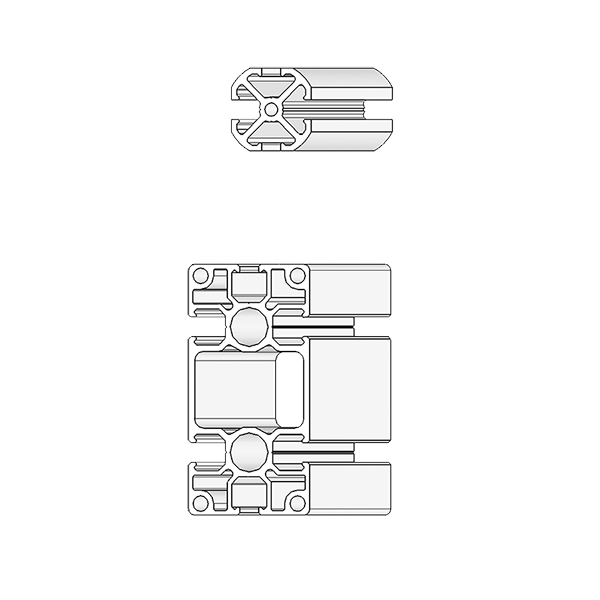
EMB
- โครงอะลมู ิเนียมสาหรับการสร้าง กรอบ EOAT
- น็อตออกแบบพิเศษสาหรับการยึดที่ แน่นหนา
- การชุบผิิวอะลมู ิเนียมเป็ นสีดาและ สีเงิน
- รูปทรงสี่เหลียม ่ จตั รุ ัสหรือวงกลม
- มี ให้เลือกถึง 15 ขนาด
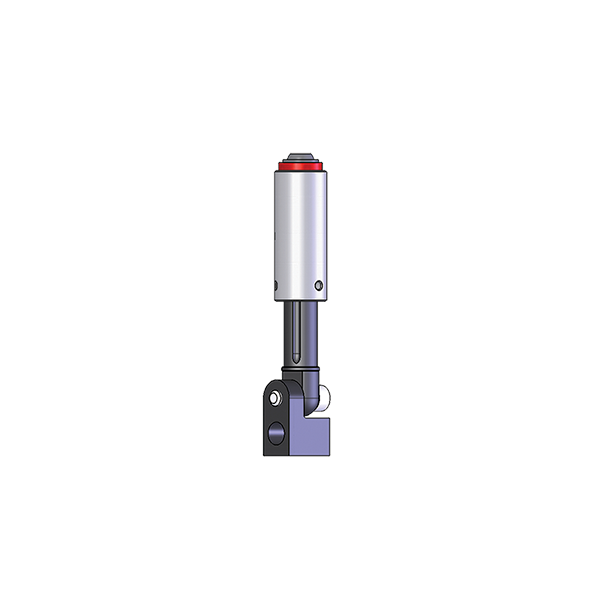
MFI
- ฉากยึดสาหรับติดตั้งตัวกระตุ้นลงบน โครงสร้าง
- มคาส ี ั่งมากกว่า 500 แบบ เพือการ ่ จัด วางที่สมบูรณ์แบบ
Tooling (EOAT)
กริปเปอร
- กริปเปอรน์ ิวแมติกนิ้วเดียวหรือ สองนิ้ว
- กริปเปอร์แบบขยาย
- กริปเปอร์แบบขยาย
- สาหรับหยิบจับแกนหัวฉีด
- สาหรับการวางตาแหน่งที่ใส่ ได้อย่าง ถูกต้อง
- มคาส ี ั่งมากกว่า 200 รายการสาหรับ EOAT โดยเฉพาะ
VS
- ตัวหยิบจับแบบถ้วยสุญญากาศ
- ส่วนกันสะเทือนแบบมีสปริงภายใน
- แบบหมุนได้หรือหมุนไม่ ได
- วัสดุจากยางแบบไมทิ้ ่ งรอย
- มคาส ี ั่งมากกว่า 500 รายการสาหรับ การทาพลาสติกโดยเฉพาะ
GN
- ีมตัดสาหรับการตัดออกจากแม่พิมพ
- ีแบบกรรไกรหรือแบบกิ โยติน
- คีมตัด 10 ขนาด
- ใบมีดทีส่ ับเปลียนไ ่ ด
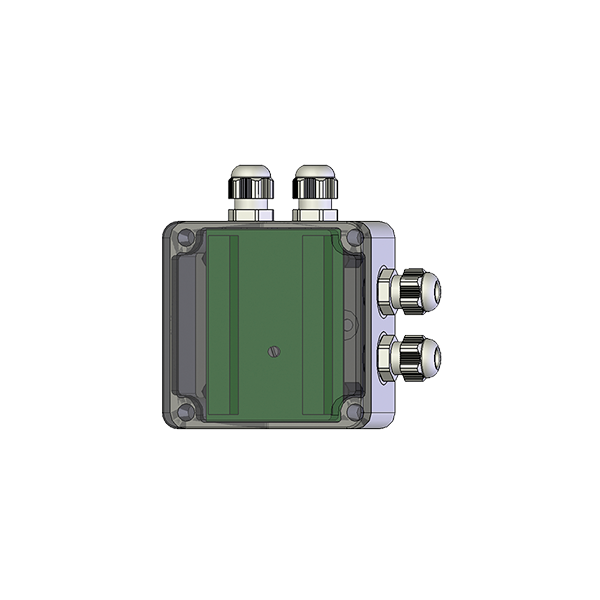
SB
- กล่องจับสัญญาณสาหรับการประมวล ผิลสัญญาณจากตัวกระตุ้น
PDF อุปกรณ์ติดปลายแขนหุ่นยนต

 Thai
Thai