
 Swedish
Swedish


















MECHA
Mechatronics teknik
Bilderna nedan visar driftssekvensen för drivsystemet som delas av gripdonen, ställdonen och de elektriska indexeringsborden. 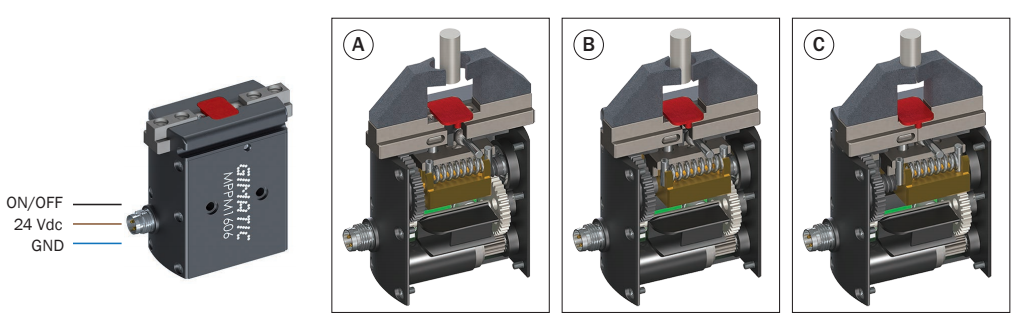
Dessa tillstånd kan även identifieras i motorns strömabsorptionsprofil.

Funktionsbeskrivning
Vid tidpunkten T0 växlar pilotsignalen från ON- till OFF-status och stänger backarna. Under DTA-tiden startar motorns drift; under fas A orsakar detta förlängningen av fjädern, som komprimerades initialt. I fas B har fjädern nått sin fria längd och backarna rör sig med en konstant hastighet tills de kommer i kontakt med arbetsstycket vid tidpunkten T2.
Under fas 3 är backarna i kontakt med arbetsstycket och komprimeringen av fjädern börjar.
Vid tidpunkten T3 stannar motorns drift och det irreversibla transmissionssystemet upprätthåller greppet även när strömmen är frånslagen, tills nästa kommando för backöppning ges (ON-status).

PNP/NPN-versioner
Gripdon finns tillgängliga i standardversion med PNP-ingång och i N-version med NPN-ingång.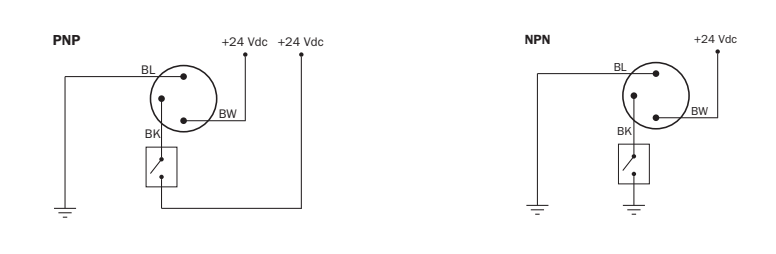
Kraftstyrning (4-stifts versioner)
I sortimentet med modeller med 4-polig M8-kontakt finns vissa versioner tillgängliga med en analog ingångskanal. Genom att ändra referensspänningen i området 2÷10 V, kan gripkraften justeras. Ett spänningsvärde under 2 V blockerar enhetens drift, vilket möjliggör skapandet av maskinens säkerhetslogik.

Toppeffekt
ÎI sortimentet med modeller med 4-polig M8-kontakt finns vissa versioner tillgängliga med en analog utgångskanal som aktiveras automatiskt av enheten när backarna utövar gripkraften. Denna fungerar som en integrerad närhetssensor som kan fungera oberoende av backarnas slutliga läge, och därmed utan justering.
Position utgång och fältbuss
Versioner med en utgångskanal (digital och/eller analog) avsedd för backpositionsmätning blir snart tillgängliga, samt versioner som är inställda för kommunikation baserad på digital fältbuss.


