




















MECHA
Технология Mechatronics
Долното изображение илюстрира последователността от работни състояния на системата за задвижване, споделена от хващачите, изпълнителните механизми и електрическите индексиращи плотове. 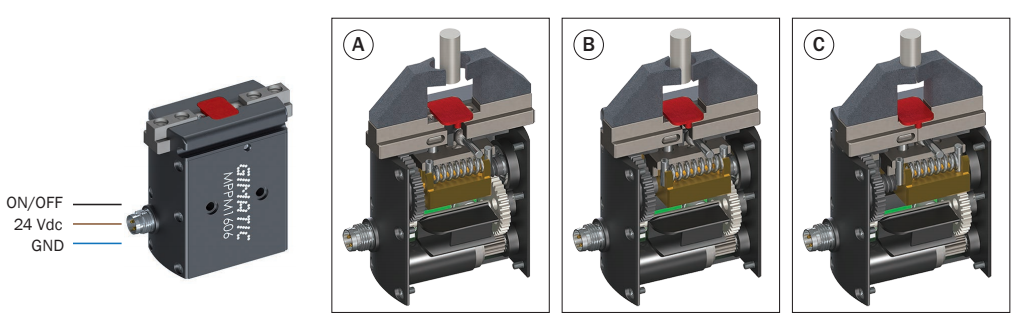
Тези състояния могат също да се идентифицират в профила за поглъщане на мощност.

Описание на работата
В момента от времето Т0 пилотния сигнал превключва от състояние ВКЛ. на ИЗКЛ., като затваря челюстите. По време на DTA електромоторът започва да работи; по време на фаза А това води до удължаване на пружината, която първоначално е компресирана. Във фаза В пружината достига дължината си в свободно състояние и челюстите се преместват при постоянна скорост, докато влязат в контакт с работния детайл в момента Т2. През фаза 3 челюстите са в контакт с работния детайл и компресията на пружината започва. В момента Т3 електромоторът спира да работи и необратимата система за предаване поддържа захвата, дори когато няма захранване, докато се подаде следващата команда за отваряне на челюстта (състояние ВКЛ.). 
Версии PNP/NPN
ЗХващачите се предлагат в стандартната версия с вход PNP и във версия N с вход NPN.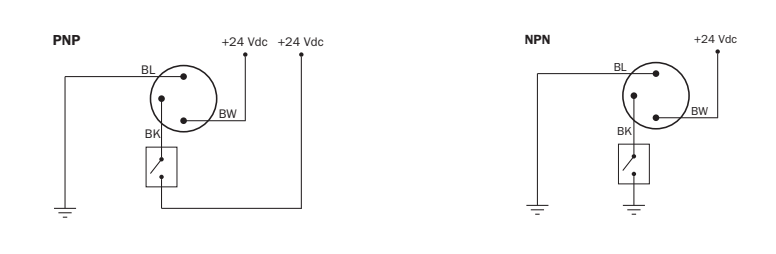
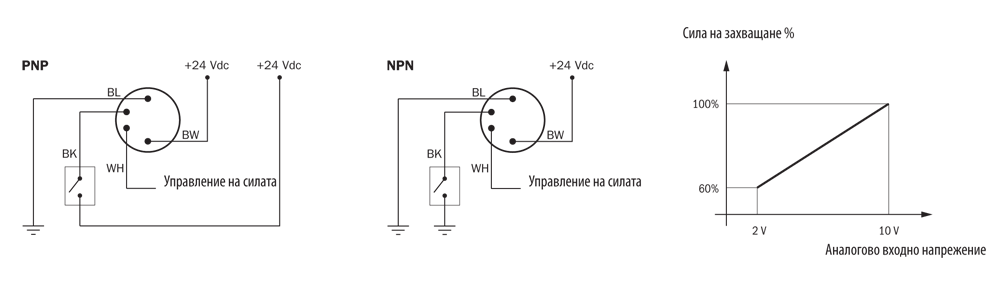
Контрол на силата (4-пинови версии)
В гамата от модели с 4-пинов конектор M8 някои версии са предлагат с аналогов входен канал. Като се промени референтното напрежение в диапазона 2÷10 V, може да се регулира силата на захващане. Стойност на напрежението, по-малка от 2 V, ще попречи на работата на устройството, като позволи задействане на логиката за безопасност н устройството.
Пиков изход
В гамата от модели с 4-пинов конектор М8 някои версии се предлагат с цифров изходен канал, който автоматично се активира от устройството, когато челюстите упражнят силата на захващане. Това работи като интегриран датчик за близост, който може да работи независимо от крайната позиция на челюстите и поради това без настройка.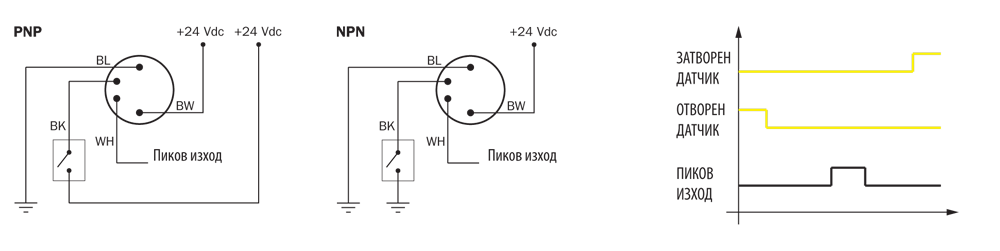
Изходна позиция и магистрална шина
Версии с изходен канал (цифров и/или аналогов), предвидени за измерване на позицията на челюстта, скоро ще бъдат налични, както и версии, настроени за комуникация на базата на цифрови магистрални шини.


