Portuguese
Portuguese


















MECHA
Tecnologia mechatronics
As imagens abaixo mostram os estados sucessivos de funcionamento do sistema de atuação comum às pinças, aos atuadores e às mesas giratórias elétricas. 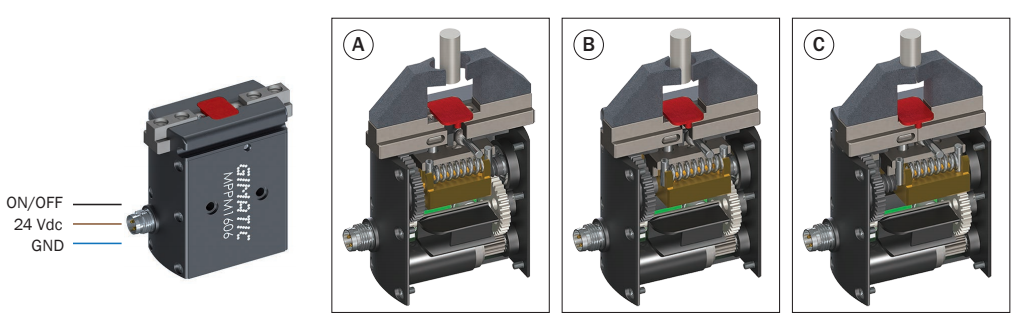
Os mesmos estados são reconhecidos também no perfil de corrente de absorção do motor.
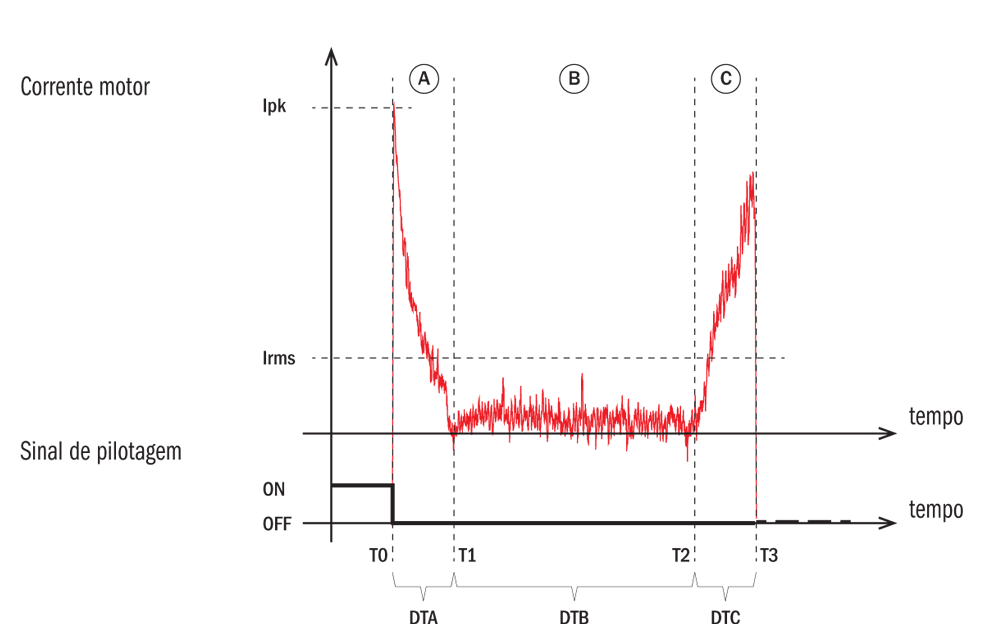
Descrição do funcionamento
No tempo T0 o sinal de pilotagem passa do estado de ON para o estado de OFF comandando o fecho dos mordentes. Durante o período DTA o motor começa a rotação causando na fase A a extensão da mola inicialmente comprimida. Na fase B a mola assumiu o seu comprimento livre e os mordentes cumprem um movimento de velocidade constante até ao contacto com a peça no tempo T2.
Durante a fase 3 os mordentes estão em contacto com a peça e começa a compressão da mola.
No tempo T3 o motor termina a sua rotação e graças ao sistema de transmissão irreversível a recolha é mantida mesmo na ausência de tensão de alimentação até ao próximo comando de abertura dos mordentes (estado ON). 
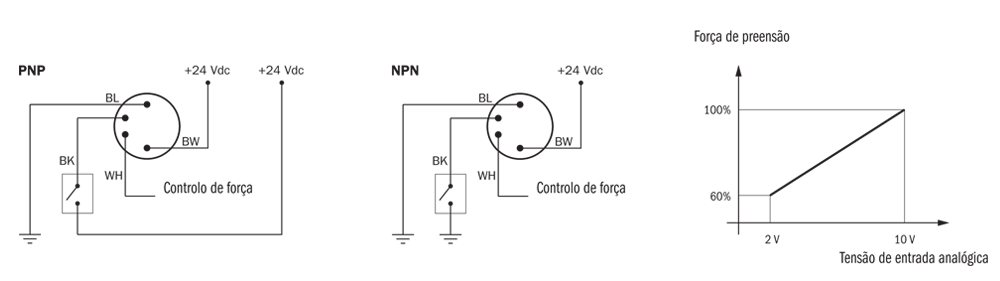
Versões PNP/NPN
As pinças estão disponíveis na versão standard com entrada tipo PNP e na versão N com entrada tipo NPN.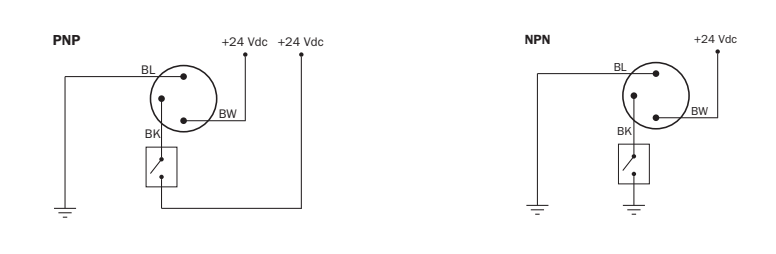
Controlo de força (versões com 4 pinos)
Entre os modelos com conector M8 de 4 pinos, estão disponíveis versões com um canal de entrada analógico. Variando a tensão de referência no intervalo 2÷10 V, é possível regular a força de preensão. Valores de tensão inferiores a 2 V inibem o funcionamento do dispositivo, permitindo a criação de lógicas de segurança na máquina.
Saída pico
Entre os modelos com conector M8 de 4 pinos, estão disponíveis versões com um canal de saída digital que é ativado automaticamente pelo dispositivo quando os mordentes exercem força de preensão. Deste modo obtém-se a funcionalidade de um sensor de proximidade integrado que pode operar independentemente da posição final dos mordentes e, portanto, sem nenhuma regulação.
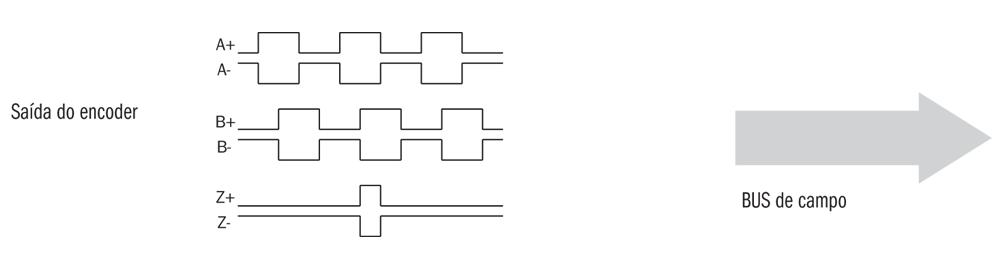
Saída de posição e BUS de campo
Em breve estarão disponíveis versões com um canal de saída específico para medir a posição dos mordentes (digital e/ou analógico) e versões próprias para comunicação utilizando BUS de campo digital.