
 Portuguese
Portuguese


















Glossário
Força total de preensão
Valor médio de força distribuída pelos mordentes.
Binário de aperto total
Valor médio de binário distribuído pelos mordentes.
Binário de rotaçãov
Valor médio de binário distribuído pelo prato giratório.
Curso
Valor médio do curso total dos mordentes.
Frequência
Valor médio de frequência ciclo composto por abertura, fecho e tempo de arrefecimento para evitar temperatura excessiva do motor. Este valor é determinado sem carga ligada ao atuador.

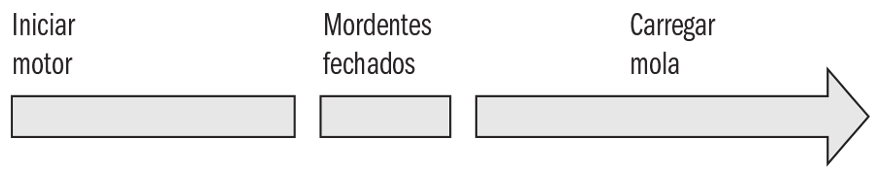
Tempo de fecho do mordente
Tempo de apenas movimento mecânico de fechamento mordentes após o start do motor e antes da compressão da mola.

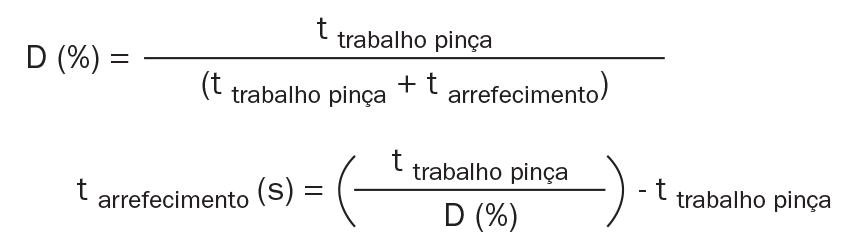
Tempo de trabalho da pinça
Tempo total de start motor, movimentação mordentes e compressão da mola.
Ciclo de trabalho
Relação entre o tempo operacional do actuador e o tempo total de ciclo que inclui também o tempo de arrefecimento.
Tensão de alimentação
É a tensão contínua necessária para alimentar o actuador.
Corrente de pico
Corrente máxima de alimentação do motor limitada pela tensão de BUS, da resistência elétrica do motor (com temperatura predefinida,) e por fatores construtivos. Para os motores lineares, atuadores lineares elétricos e guias lineares elétricas representa o valor máximo rms.
Potência de motor sem buchas
Máxima potência mecânica do motor brushless
Conexão
Conector circular metálico standard M8x1, 3 pólos.
Sinal de entrada aberturas/fecho
Lógica de colector aberto pilotável com +24Vdc e GND.
Temperatura de trabalho
Temperatura ambiente que representa as condições normais de funcionamento, limitada pelas características dos materiais e viscosidade do lubrificante.
Grau de protecção
Código que resume o nível de protecção do equipamento eléctrico contra a entrada de partes sólidas e líquidas.
Ruído
Valor fundamental de ruído expresso em decibel por área predominantemente industrial.
Massa
Massa total do actuador compreendido de motor brushless.
Certificação Câmara branca IPA
Certificação ISO14644-1 para a utilização do actuador em sala branca realizada no Fraunhofer Institute.
Certificação CE
Compatibilidade electromagnética (EMC) de acordo com EN61000-06-2:2005; EN61000-6-3:2007; EN61000-6-4:2007.
Tensão BUS
Tensão de pico fornecida pelo accionamento do motor.
Força de pico
Força de corrente de pico.
Constante de força
Constante de proporcionalidade directa entre a corrente de alimentação e a força fornecida pelo motor.
Cogging
Interacção entre ímanes permanentes e o estator causando uma força de distensão periódica a cada pólo.
Força contínua
Força distribuída pelo motor com a corrente contínua.
Corrente contínua
Corrente com a qual o motor pode ser alimentado por tempo indefinido e que implica o alcance da temperatura interna no valor limite pré-estabelecido (sem sobreaquecimento).
Resistência de fase
Valor de resistência eléctrica equivalente medida nas extremidades de uma fase a temperatura predefinida.
Inductância de fase
Indutância eléctrica equivalente medida nas extremidades de uma fase.
BEMF constante
Retro tensão criada quando o motor é movido a 1 m/s.
Resistência térmica
Sobre temperatura para cada Watt de potência produzido pelo motor.
Térmica constante
Tempo para que o motor alcance a temperatura máxima.
Temperatura máxima de fase
Temperatura máxima alcançável pelos enrolamentos.
Valor PTC
Valor da resistência do sensor de temperatura.
Tensão máxima PTC
Tensão máxima de alimentação aplicável nas extremidades do termistor PTC.
Transdutor de retroacção
Dispositivo electrónico para verificar e medir as posições respetivas do motor e da corrediça.
Saída circuito
Tipo de sinal gerado pelo transdutor de retroação para o controlador. ABZ: sinal de saída com onda quadrada. SIN/COS: sinal de saída sinusoidal. HALL: saída em baixa resolução para sincronização motor.
Señal de salida
Padrão de comunicação utilizado.
Consumo de corrente
Máxima velocidade na qual o sensor consegue fornecer uma informação correta da posição.
Velocidade de trabalho
Maksymalna prędkość czujnika, przy której można uzyskać prawidłową informację o pozycji.
Resolução
Parâmetro que indica a precisão da detecção dos deslocamentos mecânicos.

Repetitividade
Exprime a concordância entre uma série de medidas em condição invariável de medida.
Passo polar
Distância linear entre dois pólos magnéticos iguais consecutivos (Norte > Norte; Sul > Sul).
IImpulsos / Sinusóides
Número de impulsos ou ondas sinusoidais no interior de um passo polar.

