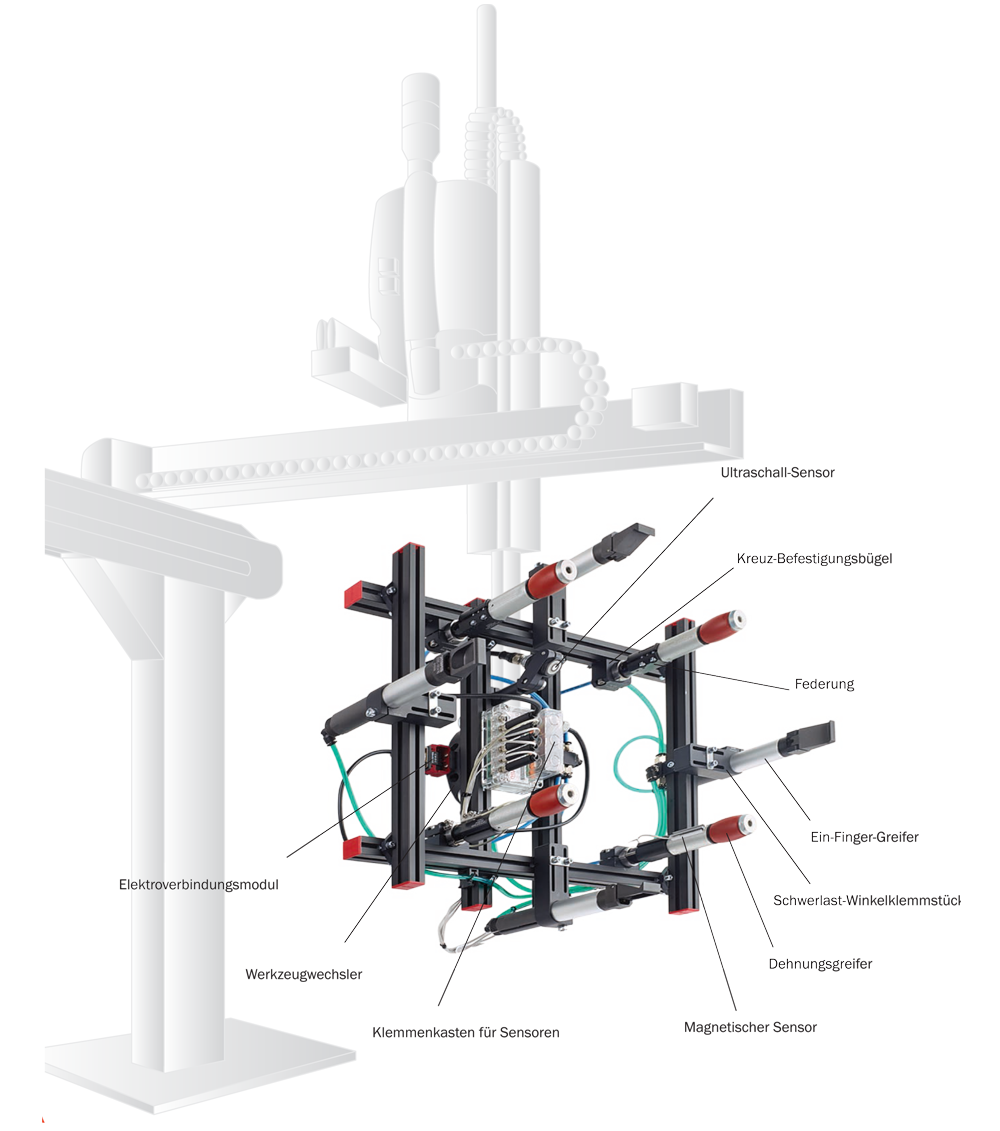
EOAT-Greiferstruktur
EOAT-Greiferstruktur
Was ist EOAT?
Es handelt sich hierbei um den Rahmen (mit allen erforderlichen Werkzeugen), der am Roboter angebracht ist, um die Spritzgusspressen zu entladen.
Seine Aufgaben:
- Entnehmen des Formteils aus der Form;
- Festes Greifen des Formteils;
- Trennen des Formteils vom Anguss;
- Greifen des Angusses nach dem Schneiden;
- Abgabe des Angusses an die Recycling-Maschine;
- Abstellen des Formteils auf einer Palette oder einem Förderband.
End of Arm
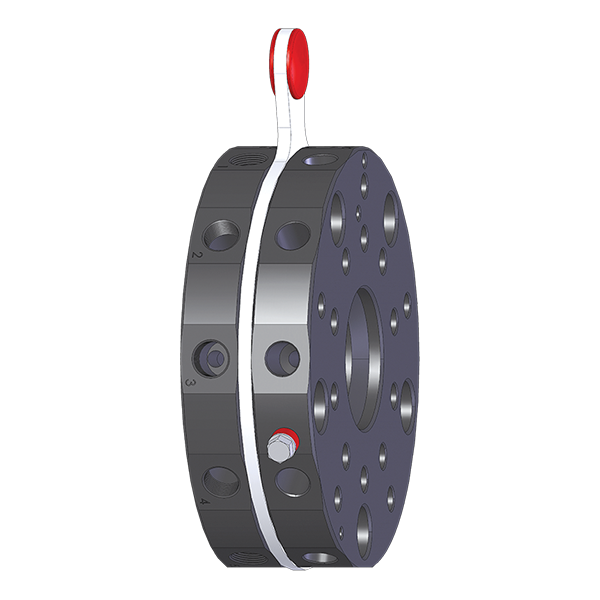
QC
- Schnelle Wechsler für einfache Verbindungen zwischen dem Roboter und den EOAT..
- 15 Modelle und 5 Größen von bis zu 75 kg Nutzlast.
- Pneumatik- und Elektroverbindungen.
- Luftventile.
- LOQC für Sicherheitsschloss.
- RFID zur EOAT-Identifizierung.
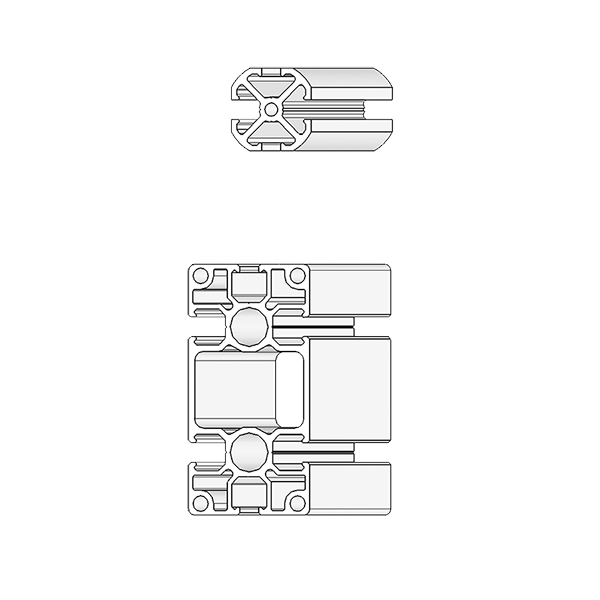
EMB
- Aluminiumprofile für EOAT Rahm
- Spezielle Muttergestaltung für eine starre Befestigung.
- Schwarze und silberne Eloxierung.
- Quadratische oder runde Form.
- 15 Größen.
MFI
- Halterungen zur Montage des Aktuators auf den Rahmen.
- Mehr als 500 Codes für eine perfekte Positionierung verfügbar.
Tooling (EOAT)
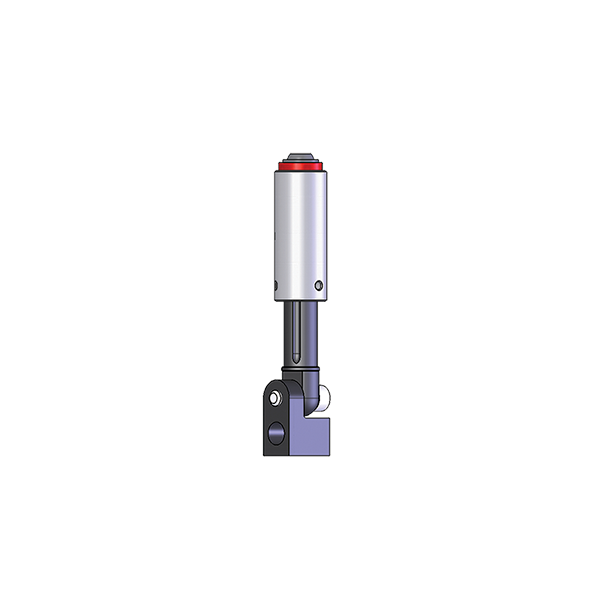
Greifer
- Pneumatische Greifer mit einem oder zwei Fingern.
- Expansionsgreifer.
- Zum Werkstückhalten.
- Zum Angusshalten.
- Für sehr genaue Einsatzpositionierung.
- Mehr als 200 Codes für EOAT-Anwendungen.
VS
- Saugnapfhalter.
- Federungen mit interner Feder.
- Drehend oder nicht-drehend.
- Abriebfeste Gummimaterialien.
- Mehr als 500 Codes für PLASTICS.
GN
- Zangen zur Angussentfernung.
- Schere oder Guillotine-Stil.
- 10 Zangen-Größen.
- Untereinander austauschbare Klingen.
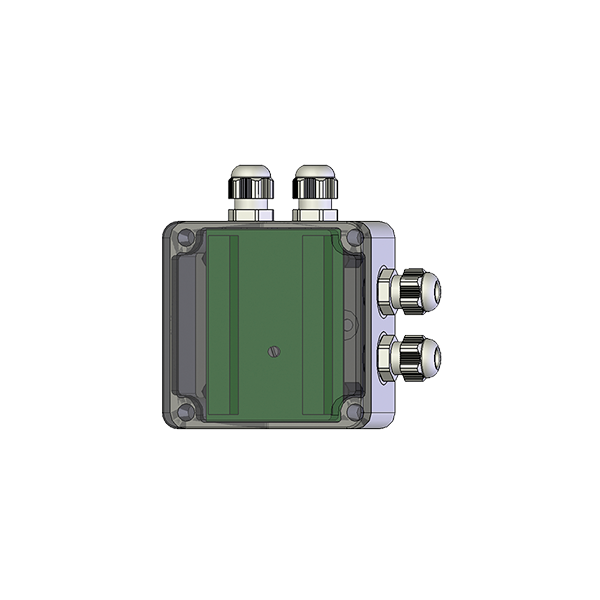
SB
- Sensorenboxen zur Verarbeitung der Signale von den Aktuatoren.
PDF Plastics Philosophy

 German
German