
 German
German


















MECHA
Mechatronics-Technologie
Die Bilder hier unten zeigen die nachfolgenden Betriebszustände des gemeinsamen Antriebssystems von Greifern, Antrieben und elektrischen Drehtischen. 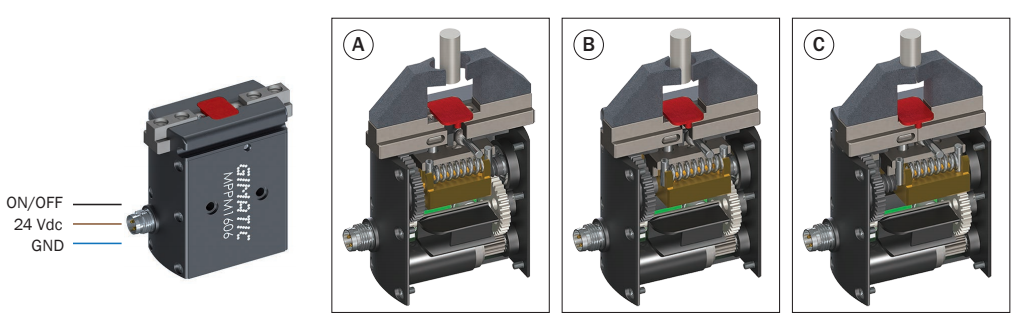
Dieselben Zustände sind auch im Profil der Stromaufnahme des Motors erkennbar.
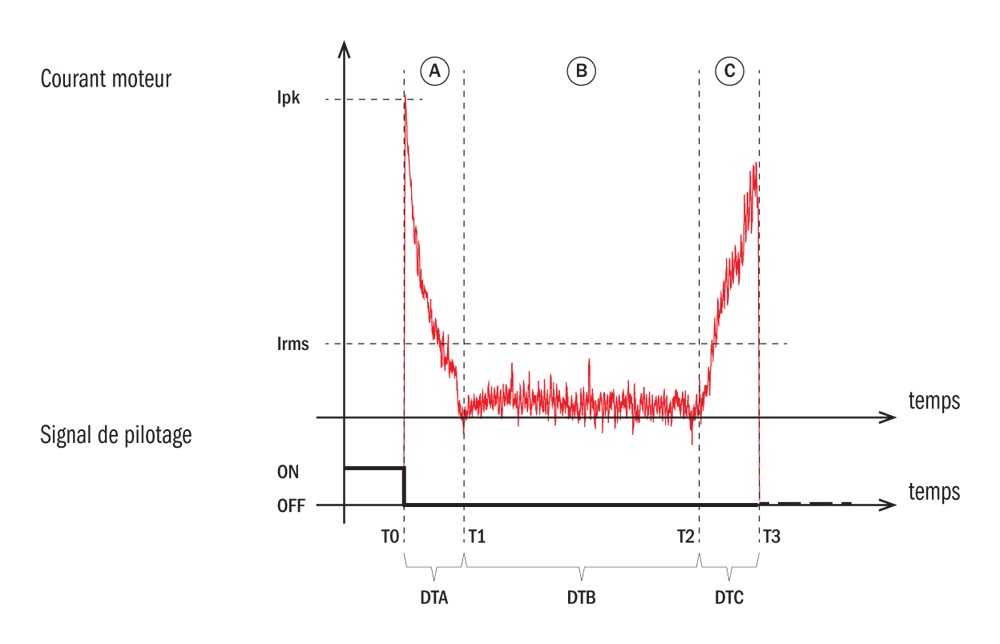
Betriebsbeschreibung
Zum Zeitpunkt T0 geht das Steuersignal vom Zustand ON auf den Zustand OFF über und steuert das Schließen der Backen. Während der DTA-Zeit beginnt der Motor mit der Rotation, was in der Phase A die Ausstreckung der zunächst komprimierten Feder zur Folge hat. In der Phase B hat die Feder ihre freie Länge erreicht und die Backen führen eine Bewegung mit konstanter Geschwindigkeit aus, bis sie das Werkstück zum Zeitpunkt T2 berühren.
Während der Phase 3 berühren die Backen das Werkstück und es beginnt die Kompression der Feder.
Zum Zeitpunkt T3 beendet der Motor seine Rotation und dank des irreversiblen Übertragungssystems bleibt die Greifposition auch ohne Stromversorgung bis zum nächsten Befehl zum Öffnen der Backen (Zustand ON) beibehalten.

PNP/NPN Versionen
Die Greifer sind in der Standardversion mit PNP-Eingang und in der N-Version mit NPN-Eingang erhältlich.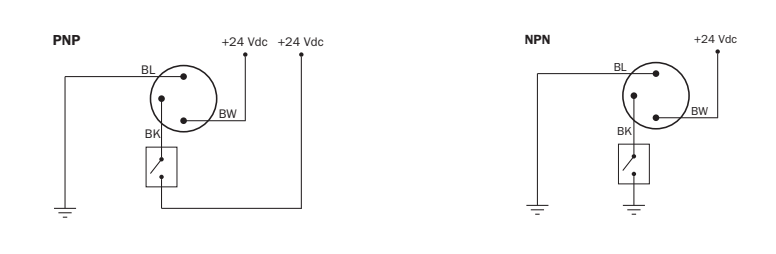
Kraftsteuerung (4 Pin Versionen)
Bei den Modellen mit 4 Pin M8 Steckern sind Versionen mit einem Analogeingangskanal erhältlich. Durch Variieren der Referenzspannung im Bereich 2÷10 V kann die Greifkraft eingestellt werden. Ein Spannungswert unter 2 V sperrt den Betrieb der Vorrichtung und ermöglicht somit das Erstellen von Maschinensicherheitslogiken.

Spitzenleistung
Unter den Modellen mit 4 Pin M8 Stecker sind Versionen mit einem Digitalausgangskanal erhältlich, der automatisch von der Vorrichtung aktiviert wird, sobald die Backen die Greifkraft ausüben. Auf diese Weise erhält man die Funktionalität eines integrierten Näherungssensors, der unabhängig von der Endposition der Backen und somit ohne Einstellung arbeiten kann.
Positionsausgang und Feldbus
In Kürze werden Versionen mit einem dedizierten Ausgangskanal für die Messung der Backenposition (digital und/oder analog) und Versionen, die für die Kommunikation auf Basis digitaler Feldbusse eingerichtet sind, erhältlich sein.


