Czech
Czech


















MECHA
Technologie mechatroniky
Obrázky níže ilustrují sekvenci provozního stavu hnacího systému sdíleného upínacími zařízeními, regulátory a elektrickými dělicími stoly. 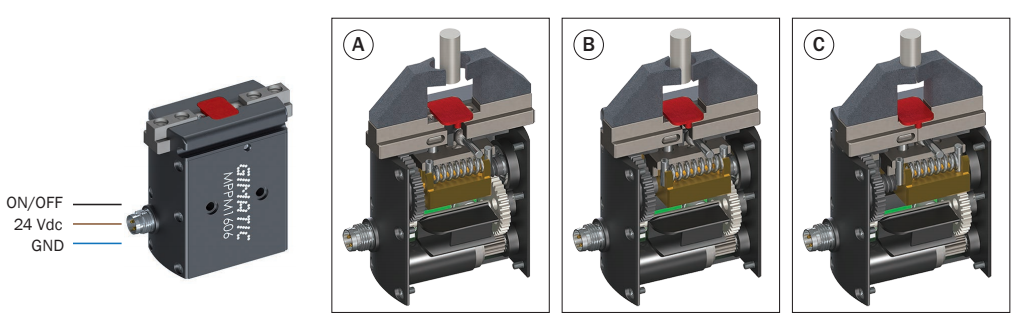
Tyto stavy lze také identifikovat v profilu absorpce výkonu motoru.

Popis činnosti
V čase T0 se pilotní signál přepne ze stavu ZAP do stavu VYP a uzavře čelisti. Během času DTA se motor spustí; během fáze A toto způsobí protažení pružiny, který byla prvně stlačena. Ve fázi B dosáhla pružina své volné délky a čelisti se pohybují konstantní rychlostí, dokud se nedostanou do kontaktu s obrobkem v čase T2.
Během fáze 3 jsou čelisti ve styku s obrobkem a začíná komprese pružiny.
V čase T3 se motor zastaví a systém nevratné transmise zachová uchopení dokonce u v případě vypnutí, dokud není vydán příkaz k dalšímu otevření čelistí (stav ZAP).

Verze PNP/NPN
Upínací zařízení jsou dostupná ve standardní verzi se vstupem PNP a ve verzi N se vstupem NPN.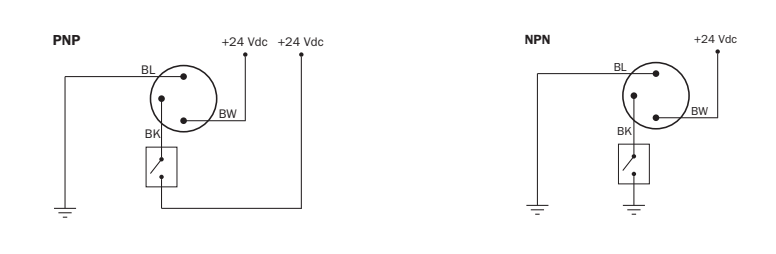
Nucené ovládání (verze se 4 piny)
V rozsahu modelů se 4pinovým konektorem M8, některé verze jsou dostupné s analogovým vstupním kanálem. Změnou referenčního napětí v rozsahu 2÷10 V lze upravit sílu uchycení. Hodnota napětí nižší než 2 V zastaví činnost zařízení a umožní vytvoření bezpečnostní logiky zařízení. 
Špičkový výstup
U řady modelů se 4pinovým konektorem M8 jsou některé verze dostupné s digitálním výstupním kanálem, který je automaticky povolen zařízením, když čelisti vyvinou uchopovací sílu. Toto zařízení bude fungovat jako integrovaný snímač přiblížení, který lze ovládat nezávisle na konečné poloze čelistí a tedy bez nastavení.
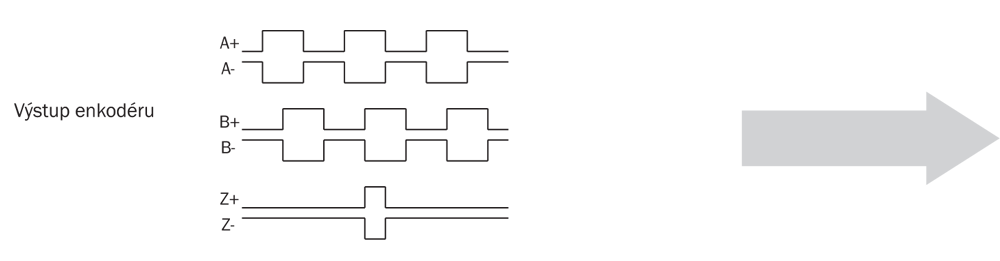
Poloha výstupu a sběrnice fieldbus
Brzy budou dostupné verze s výstupním kanálem (digitální a/ nebo analogový) určené pro měření polohy čelisti a také verze nastavené pro komunikaci založené na digitální sběrnici fieldbus.