
 Turkish
Turkish


















MECHA
Mekatronik teknolojisi
Aşağıda yer alan şekiller, tutucular, aktüatörler ve elektrikli endeksleme tabloları tarafından paylaşılan sürücü sisteminin çalışma sıralamasını görüntülemektedir. 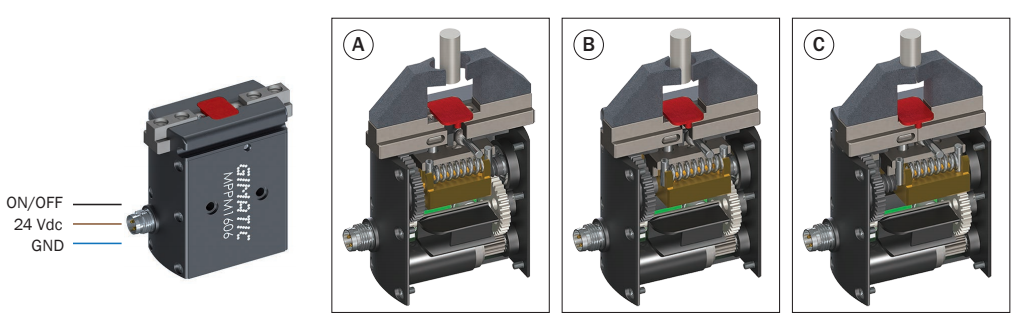
Bu durumlar, motorun güç emiş profilinden de görülebilir.
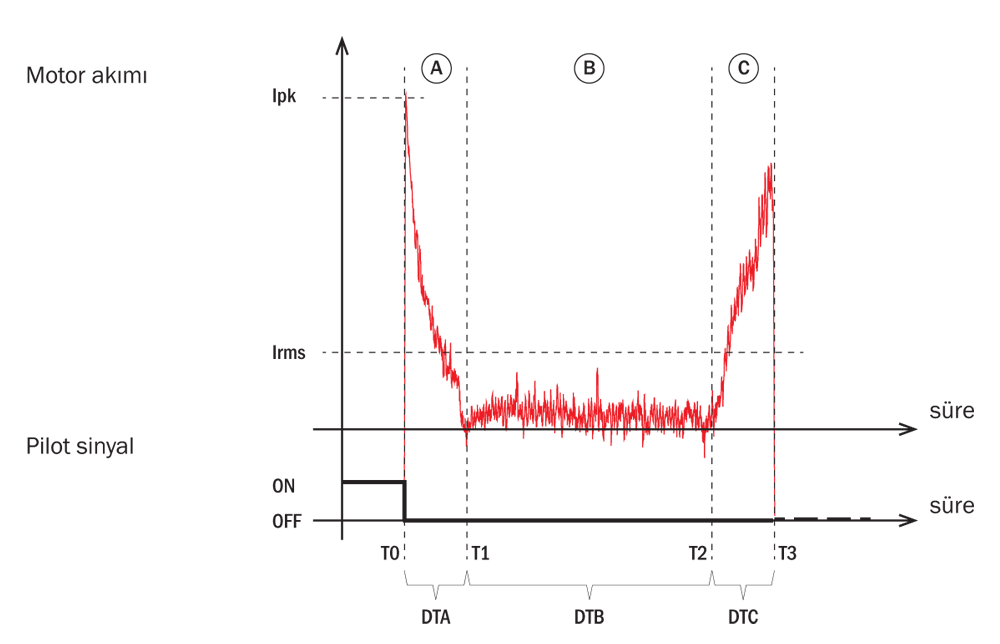
İşlem tarifi
T0 zamanında pilot sinyal ON OFF durumuna geçerek çeneleri kapatır. DTA zamanı boyunca motor çalışmaya başlar; A aşaması sırasında bu durum, başlangıçta sıkışmış bulunan yayın uzamasına neden olur. B aşamasında yay serbest boyunca ulaşmıştır ve çeneler, T2 zamanında çalışma parçası ile temas edene kadar sabit hızda hareket eder.
Aşama 3 zarfında çeneler çalışma parçası ile temas halindedir ve yay sıkışmaya başlar.
T3 zamanına ulaşıldığında motor stop eder ve geri dönüşümsüz aktarma sistemi, takip eden çene açma komutu verilene kadar (ON durumu) besleme olmasa dahi kavramayı muhafaza eder.

PNP/NPN versiyonları
Tutucular, PNP girişi ile standart versiyon ve NPN girişi ile N versiyonu halinde mevcuttur.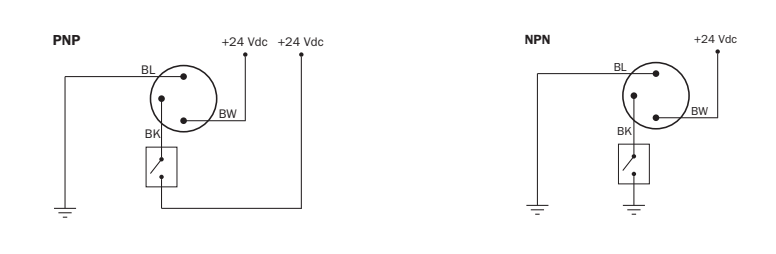
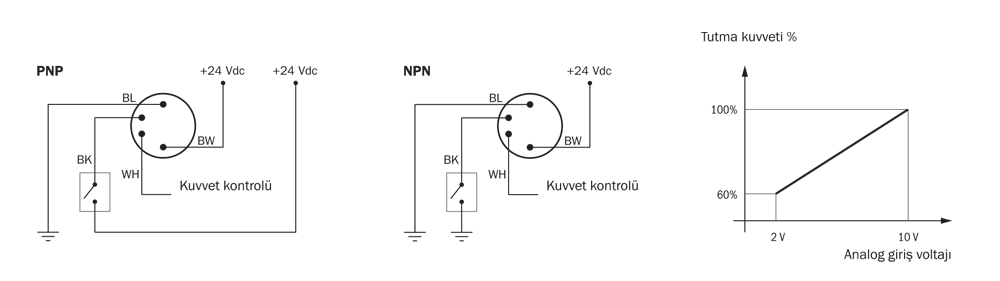
กKuvvet kontrolü (4 pinli versiyon)
4 pinli M8 konnektörlü modellerin bazı versiyonlarında, analog giriş kanalı da mevcuttur. Referans voltajın 2÷10 V aralığında değiştirilmesi ile tutucu kuvvet ayarlanabilmektedir. 2 V’den daha düşük bir volyaj cihazın çalışmasını engelleyerek, makine güvenlik mantığının oluşmasına neden olur.
Pik çıkışı
4 pinli M8 konnektörlü modellerin bazı versiyonlarında, çeneler tutucu kuvveti uyguladıklarında cihaz tarafından otomatik olarak devreye giren bir dijital çıkış kanalı mevcuttur. Bunlar, çenelerin nihai konumunu bağımsız olarak belirleyebilen, dolayısı ile ilave ayar gerektirmeyen entegre yakınlık sensorları gibi çalışmaktadır.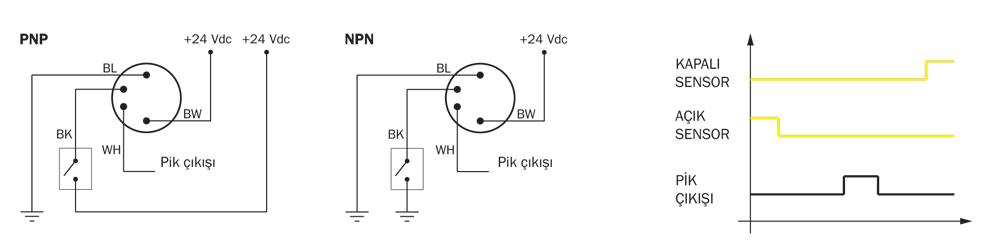
Konum çıkışları ve fieldbus
Çene konum ölçümüne tahsis edilen çıkış kanallı (dijital ve/ veya analog) versiyonlar ile dijital fieldbusa dayalı iletişim için ayarlanmış versiyonlar yakında piyasaya sürülecektir.


