Serbian
Serbian


















MECHA
Mechatronics technology
The images below illustrate the operating state sequence of the drive system shared by the grippers, the actuators and the electric indexing tables. 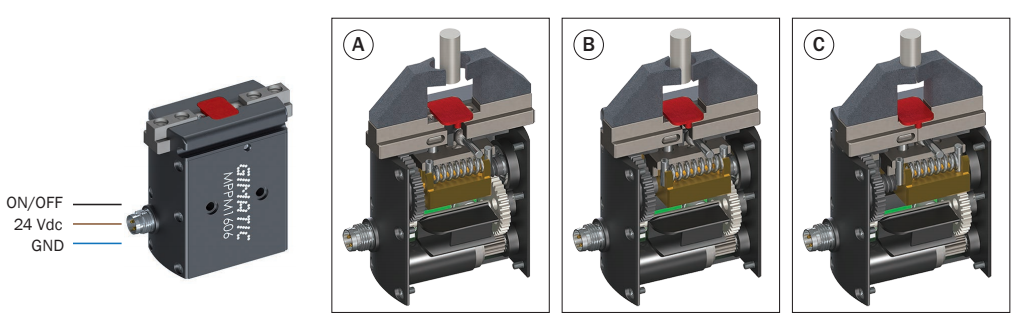
These states can also be identified in the motor's power absorption profile.

Operation description
At time TO, the pilot signal switches from ON to OFF status, closing the jaws.
During the DTA time, the motor starts to run; during phase A this causes the extension of the spring, which was initially compressed. In phase B, the spring has reached its free lenght and the jaws move at constant speed untile they come into contact with the workpiece at time T2.
During phase 3, the jaws are in contact with the workpiece, and compression of the spring starts.
At time T3, the motor stops running and the irreversible transmission system maintains the grip even when not powered up, until the next jaw opening command is given (ON status).

PNP/NPN versions
Grippers are available in the standard version with PNP input and in the N version with NPN input.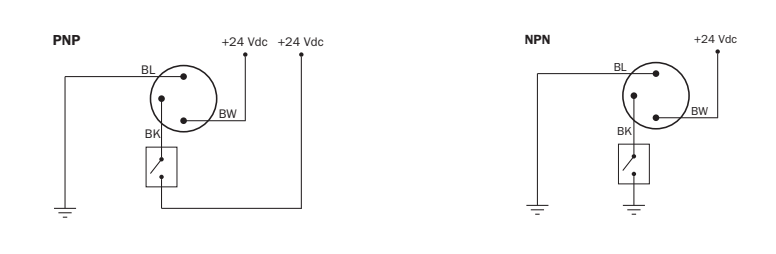
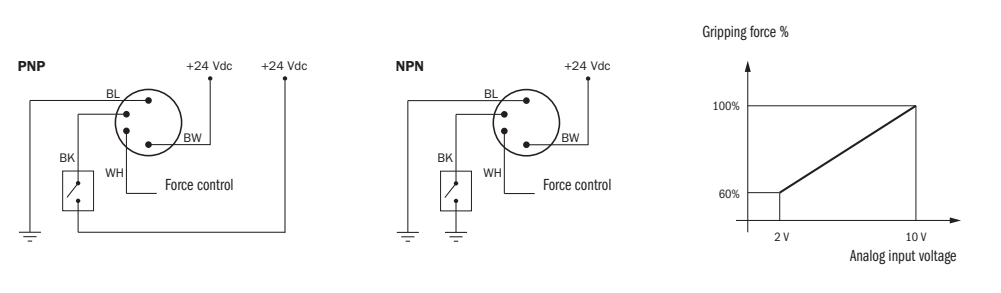
Force control (4-pin versions)
In the range of models with 4-pin M8 connector, some versions are available with an analog input channel.
By changing the reference voltage in the 2÷10 V range, the gripping force can be adjusted.
A voltage value lower than 2 V will inhibit the device operation, allowing the creation of machine safety logics.
Peak output
In the range of models with 4-pin M8 connector, some versions are available with a digital output channel which is automatically enabled by the device when the jaws exert the gripping force.
This will work like an integrated proximity sensor which can operate independently of the final position of the jaws, and therefore with no adjustment.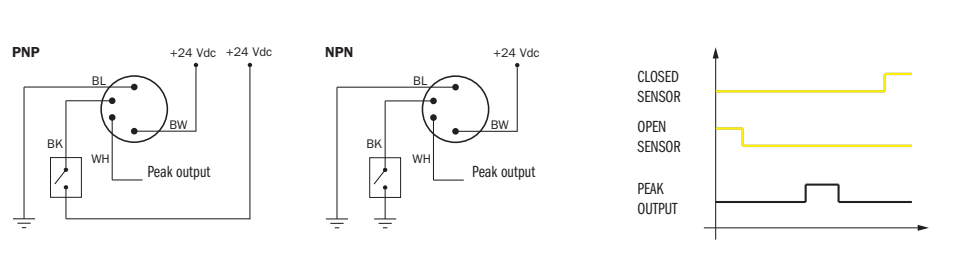
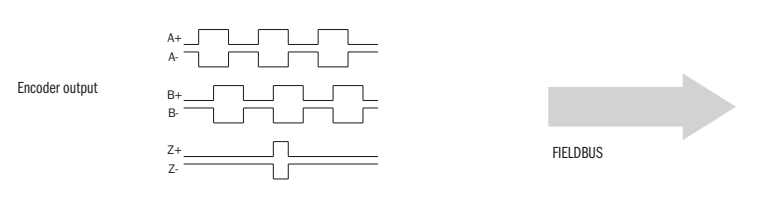
Position output and fieldbus
Versions with an output channel (digital and/or analog) dedicated to jaw position measurement will soon be available, as well as versions set for communication based on digital fieldbus.