Russian
Russian


















MECHA
Технология мехатроники
Следующие изображения показывают рабочие положения общей приводной системы захватов, приводов и электрических делительно-поворотных столов. 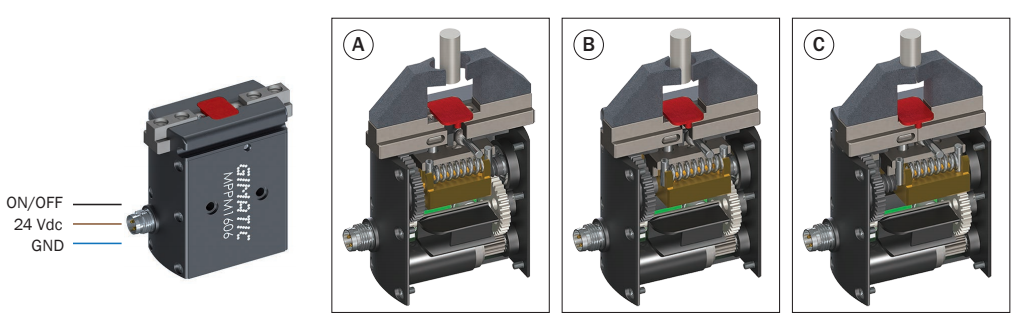
Эти положения могут также быть идентифицированы в профиле поглощения тока мотора.
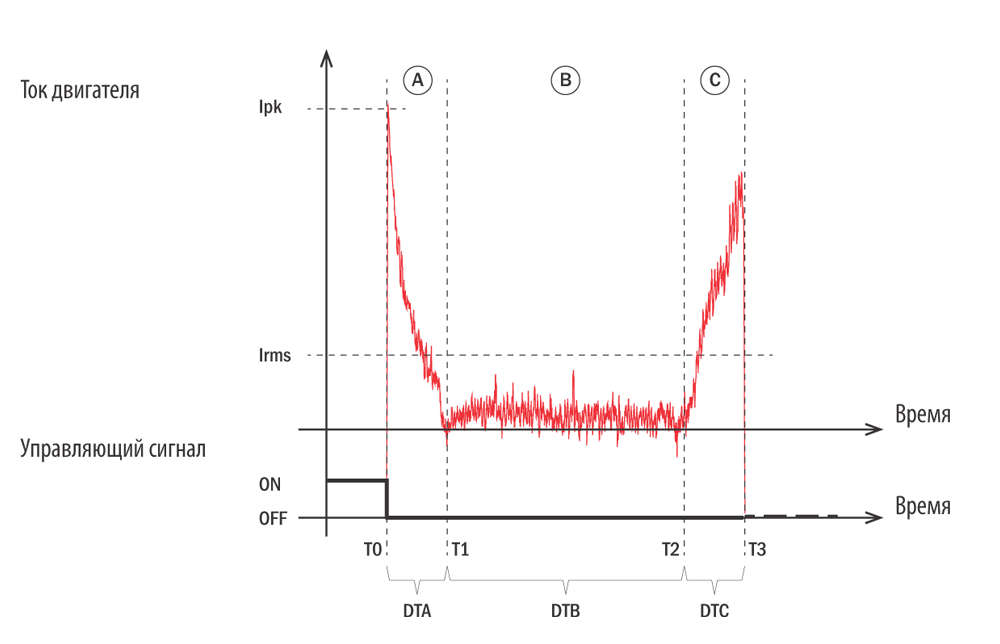
Описание функционирования
За время Т0, управляющий сигнал переходит из статуса ON в статус OFF, закрывая губки. За время отрезка DTA, двигатель начинает вращение, вызывая в фазе А растяжение сжатой вначале пружины. В фазе В, пружина принимает свою свободную длину и губки двигаются с неизменной скоростью до контакта с частью за время Т2.
Во время фазы 3, губки находятся в контакте с частью и начинается сжатие пружины.
За время Т3, двигатель прекращает вращение и, благодаря нереверсивной передаче, удержание продолжается также и в отсутствии напряжения питания, до следующей команды открытия губок (статус ON). 
ВЕРСИЯ PNP/NPN
Захваты доступны в стандартном варианте, с входом PNP, или в варианте N, с входом NPN.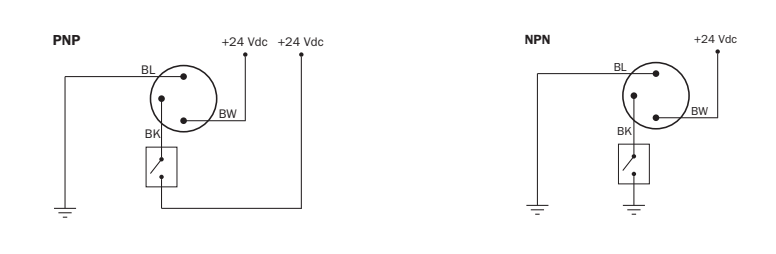
Контроль силы (версии с 4 контактами)
В линейке моделей с коннектором М8 с 4 контактами, доступные версии с каналом аналогового входа. Варьируя опорное напряжение в интервале между 2 ÷ 10 V, возможно регулировать силу удержания. Показатель напряжения, меньшего чем 2 V замедляет работу устройства, позволяя сотворение создание логик безопасности машины..

Максимальная мощность
В линейке моделей с коннектором М8 с 4 контактами, доступные версии с каналом аналогового входа. Варьируя опорное напряжение в интервале между 2 и 10 V, возможно регулировать силу удержания. Таким способом достигается функциональность интегрированного датчика близости, который может работать независимо от финальной позиции губок, а значит - без какой либо регуляции
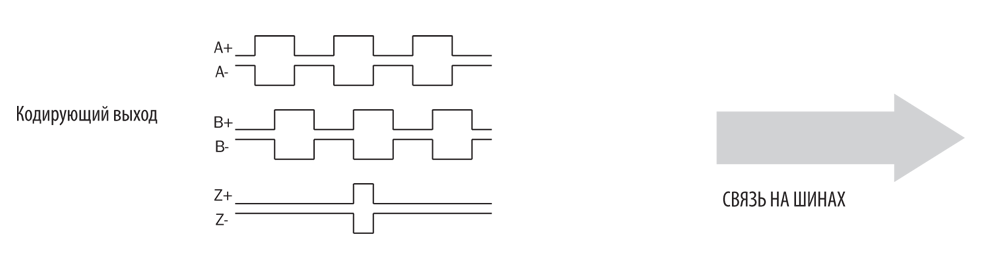
Вывод информации и позиции и промышленная сеть
Скоро будут доступны версии с каналом выхода, для измерения позиции губок (цифровым и/или аналоговым) и версии, предрасположенные для коммуникации, на основе цифровой промышленной сети.