Russian
Russian


















Sensors
Общее описание
Магнитные датчики — это устройства, которые меняют статус выхода контура в присутствии магнитных полей.
Как правило, они используются в качестве датчиков приближения на цилиндрах с постоянным магнитом в поршне.
Поместив датчик в специальный корпус на внешней части цилиндра, можно определять положение поршня с помощью электрического контакта или сигнала напряжения.
Чувствительным элементом датчика может быть герконовый переключатель или магниторезистивная ИС (ГМР датчик) в зависимости от типа датчика.
Датчики предлагаются с кабельным выходом или соединителем.
Возможно изготовление по индивидуальному заказу, если наши стандартные продукты не соответствуют требованиям клиента.
Выбор датчика
Датчик — это переключатель, который обычно подключается последовательно к кабелю, поэтому его нужно устанавливать в соответствии с заданными электрическими характеристиками
В основе работы датчика может лежать один из двух принципов:
-
ГЕРКОНОВОЕ ПЕРЕКЛЮЧЕНИЕ, в котором чувствительный элемент состоит из стеклянной колбы с двумя поляризованными металлическими полосками.
Между этими полосками в присутствии магнитного поля возникает притяжение.
Может работать от напряжения постоянного или переменного тока.
Чувствительный элемент может ошибочно сработать при сильных вибрациях. -
ЭЛЕКТРОННОЕ ПЕРЕКЛЮЧЕНИЕ, в котором чувствительным элементом может быть магниторезистивная ИС (датчик ГМР), которая меняет состояние выхода в присутствии магнитных полей.
Он работает только от питания постоянного тока. Теоретически обладает бесконечным сроком службы.
Чувствительный элемент невосприимчив к сильным вибрациям.
Выбор между выходом PNP или NPN, как правило, зависит от метода встраивания в существующую систему автоматизации: для правильной работы системы тип выхода датчика должен соответствовать типу выхода используемого контроллера (или ПЛК).
Решение PNP в целом более распространено в Северной Америке и Европе, а решение NPN чаще встречается в Азии.
Датчики PNP уязвимы к коротким замыканиям, а датчики NPN могут генерировать ложные сигналы в контроллере в случае нежелательного замыкания на землю.
Наконец, нужно выбрать активное состояние датчика, т.е. нормально разомкнутый (НР) или нормально замкнутый (НЗ) датчик.
В первом случае датчик работает в соответствии с положительной логикой — сигнал не генерируется, если контакт разомкнут, но в случае короткого замыкания могут возникать ложные сигналы.
Во втором случае датчик работает в соответствии с отрицательной логикой, и в случае размыкания контакта возникнет ложный сигнал.
Логику легко поменять на обратную в обоих случаях с помощью контроллера (или ПЛК).
Инструкции по использованию магнитных датчиков
Магнитные датчики часто используются вместе с магнитами для приведения в движение электромагнитных приводов.
Основными характеристиками любого цифрового магнитного датчика являются уровень чувствительности, соответствующий значению напряженности магнитного поля, при котором датчик переключает выход.
На графике ниже показана типовая форма волны напряженности аксиального магнитного поля, измеренной гауссметром в центральном положении.
В зависимости от уровня чувствительности датчика и характеристик магнитного поля расположенный в центральном положении датчик может переключить выход несколько раз за один ход привода.
Если не указано иное, то, как правило, лучше не устанавливать датчик в центральное положение, а лучше вставить его сбоку в прорезь и вручную отрегулировать положение во время работы привода.
На практике датчики обычно используются только для определения положения конца хода.
Если вам нужно определить другие положения, обратитесь в отдел технической поддержки.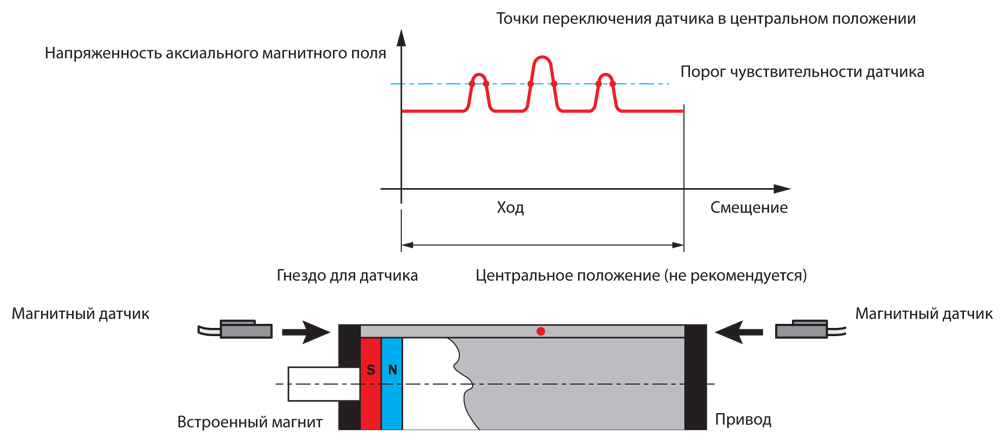
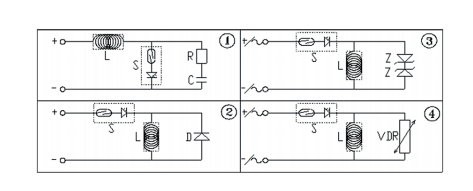
Цепь защиты датчика
При переключении индуктивных нагрузок герконовыми переключателями в момент отсоединения возникает пик высокого напряжения.
Поэтому для предотвращения диэлектрического разряда и электрической дуги необходима цепь защиты.
В этом качестве могут быть:
- резистивно-емкостной контур, подключенный параллельно нагрузке в случае подачи напряжения постоянного тока (рисунок 1);
- диод, подключенный параллельно нагрузке в случае подачи напряжения постоянного тока (рисунок 2);
- 2 туннельных диода, подключенных параллельно нагрузке при подаче напряжения переменного/постоянного тока (рисунок 3);
- варистор, подключенный параллельно нагрузке при подаче напряжения переменного/постоянного тока (рисунок 4);
При переключении емкостных нагрузок или использовании кабелей длиннее 10 метров в момент подключения возникают броски тока.
Поэтому возле переключателя на коричневом проводе необходимо защитное сопротивление.
На этом этапе нужно обеспечить наличие минимального тока, необходимого для датчика (10÷20 мА).