
 Polish
Polish


















MECHA
Technologia mechatroniczna
Poniższe ilustracje przedstawiają sekwencję stanu pracy układu napędowego współdzielonego przez chwytaki, siłowniki i suporty z indeksacją elektryczną. 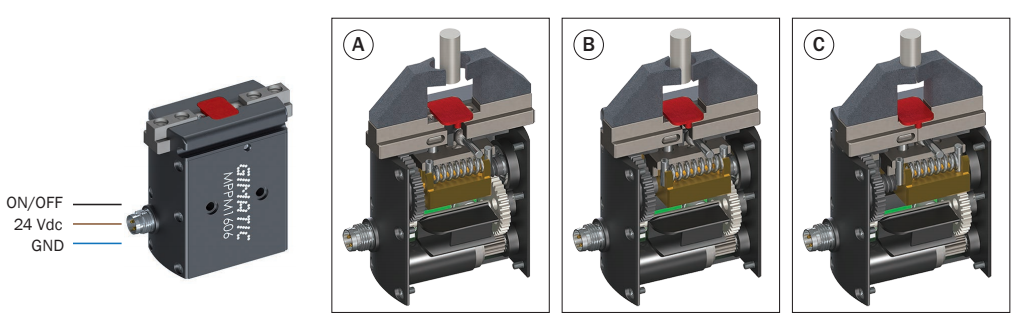
Stany te można również określić w profilu poboru mocy silnika.

Opis działania
W czasie T0 sygnał pilotowy zmienia stan z WŁ. na WYŁ., powodując zamykanie szczęk. W czasie DTA silnik uruchamia się; podczas fazy A powoduje to rozprężenie sprężyny, która początkowo była ściśnięta. W fazie B sprężyna osiąga swoją długość swobodną i szczęki poruszają się ze stałą prędkością, aż do styku z obrabianym przedmiotem w czasie T2.
W fazie 3 szczęki stykają się z obrabianym przedmiotem i rozpoczyna się ściskanie sprężyny.
W czasie T3 silnik przerywa pracę i nieodwracalny układ przeniesienia napędu utrzymuje docisk, nawet pomimo braku zasilania, aż do wysłania kolejnego polecenia otwarcia szczęk (stan WŁ.).

Wersje PNP/NPN
Chwytaki dostępne są w wersji standardowej z wejściem PNP oraz w wersji N z wejściem NPN.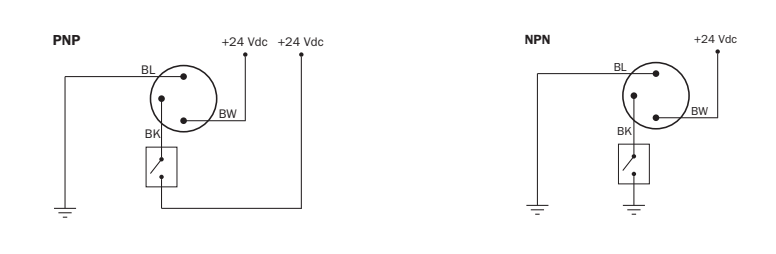
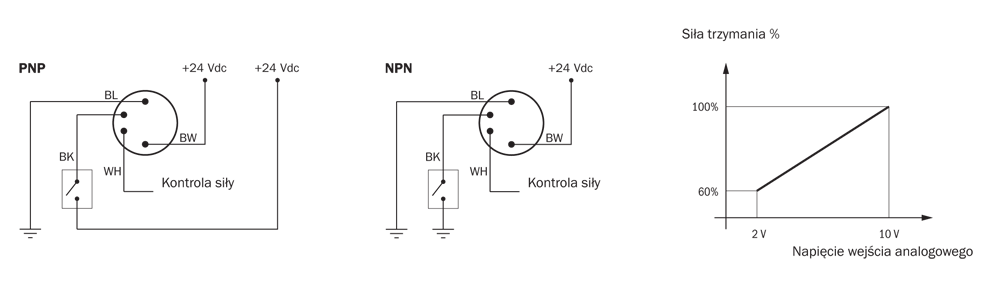
Kontrola siły (wersje 4-pinowe)
W ofercie modeli ze złączem 4-pinowym M8 niektóre wersje dostępne są z wejściowym kanałem analogowym. Zmieniając napięcie odniesienia w zakresie 2–10 V, można regulować siłę trzymania. Wartość napięcia poniżej 2 V ograniczy działanie urządzenia, co pozwala na utworzenie algorytmów logicznych bezpieczeństwa maszyny
Wydajność szczytowa
W ofercie modeli ze złączem 4-pinowym M8 niektóre wersje dostępne są z kanałem z wyjściem cyfrowym, które jest automatycznie włączane przez urządzenie, gdy szczęki zaczną wywierać siłę trzymania. Układ ten działa jak zintegrowany czujnik zbliżeniowy, który może pracować niezależnie od pozycji końcowej szczęk, a tym samym bez regulacji.
Sygnał wyjściowy pozycji i magistrala fieldbus
Wkrótce dostępne będą wersje z dedykowanym kanałem wyjściowym (cyfrowe i/lub analogowe) do pomiaru pozycji szczęk, jak również wersje przeznaczone do komunikacji w oparciu o magistralę cyfrową.


