
 French
French


















Glossaire
Force de serrage totale
Valeur moyenne de force fournie par les mâchoires.
Couple de serrage total
Valeur moyenne de couple fourni par les mâchoires.
Couple de rotation
Valeur moyenne de couple fourni par le plateau rotatif.
Course
Valeur moyenne de la course totale des mâchoires.
Fréquence
Valeur moyenne de fréquence de cycle composé d'ouverture, fermeture et temps de refroidissement pour éviter les surchauffes du moteur. Valeur déterminée sans charge connectée à l’actionneur.

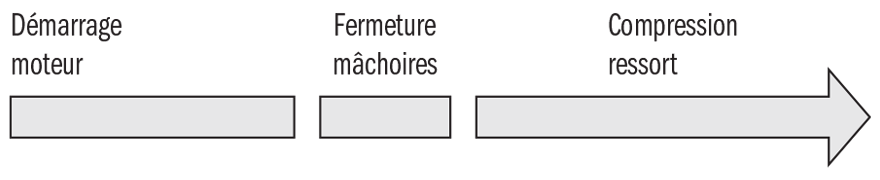
Temps fermeture mâchoires
Temps du mouvement mécanique seulement de fermeture des mâchoires après le départ du moteur et avant la compression du ressort.

Temps de travail pince
Temps total de départ du moteur, mouvement des mâchoires et compression du ressort.
Cycle de service
Rapport entre le temps de fonctionnement du vérin et le temps total du cycle qui comprend aussi le temps de refroidissement.

Tension d’alimentation
Tension continue nécessaire pour alimenter le vérin.
Courant de crête
Courant maximum d’alimentation du moteur limité par la tension de BUS, la résistance électrique du moteur (température préfixée) et les caractéristiques de construction. Pour les moteurs linéaires, les actionneurs linéaires électriques et les guides linéaires électriques représentent la valeur max. rms.
Puissance moteur sans balais
Puissance mécanique maximale du moteur brushless.
Connexion
Connecteur circulaire métallique standard M8x1, 3 pôles.
Signal d’entrée ouverture/fermeture
Logique à collecteur ouvert pilotable avec +24Vdc et GND.
Température de fonctionnement
Température ambiante représentant les conditions nominales de fonctionnement, limitée par les caractéristiques des matériaux et par la viscosité du lubrifiant.
Classe de protection
Code qui récapitule l'indice de protection de l'appareillage électrique contre la pénétration de corps solides et liquides.
Bruit
Valeur fondamentale de bruit exprimée en décibels pour un milieu principalement industriel.
Masse
Masse totale du vérin incluant le moteur brushless.
Certification salle blanche IPA
Certification ISO14644-1 pour l'utilisation du vérin en salle blanche réalisée par le Fraunhofer Institute.
Certification CE
Compatibilité électromagnétique (CEM) conformément aux normes EN61000-06-2:2005; EN61000-6-3:2007; EN61000-6- 4:2007.
Tension de BUS
Tension de crête fournie par l'actionnement du moteur.
Force de crête
Force du courant de crête.
Constante de puissance
Constante de proportionnalité directe entre le courant d'alimentation et la forcée délivrée par le moteur.
Cogging (frottement magnétique)
Interaction entre les aimants permanents et le stator, causant une force périodique résistante sur chaque pôle.
Puissance continue
Force distribuée par le moteur en courant continu.
Courant continu
Courant permettant d’alimenter le moteur de façon illimitée et comportant l’atteinte de la température interne à la valeur limite préfixée (sans surtempérature).
Résistance de phase
Valeur de résistance électrique équivalente mesurée aux bornes d'une phase à une température prédéfinie.
Inductance de phase
Inductance électrique équivalente mesurée aux bornes d'une phase.
Constante BEMF
Contre-tension générée lorsque le moteur est déplacé à 1m/s.
Résistance thermique
Surtempérature pour chaque watt de puissance produit par le moteur.
Constante thermique
Temps que met le moteur à atteindre la température maximale.
Température maximale de phase
Température maximale que les enroulements peuvent atteindre.
Valeur PTC
Valeur de la résistance du capteur de température.
Tension maximale PTC
Tension d'alimentation maximale applicable aux bornes de la thermorésistance PTC.
Transducteur de retour
Dispositif électronique pour contrôler et mesurer les positions respectives du moteur et du curseur.
Sortie circuit
Type de signal généré par le transducteur de retour vers le contrôleur. ABZ: signal de sortie à onde carrée. SIN/COS: signal de sortie sinusoïdal. HALL: sortie à faible résolution pour le calage du moteur.
Signal de sortie
Norme de communication utilisée.
Consommation de courant
Absorption maximale du capteur depuis l'alimentation.
Vitesse de travail
Vitesse maximale à laquelle le capteur réussit à fournir une information de position correcte.
Résolution
Paramètre qui indique la précision de la détection des déplacements mécaniques.

Répétabilité
Exprime la concordance entre une série de mesures dans des conditions de mesure inchangées.
Pas polaire
Distance linéaire entre deux pôles magnétiques égaux consécutifs (Nord > Nord; Sud > Sud).
Impulsions / Sinusoïdes
Nombre d'impulsions ou d'ondes sinusoïdales au sein d'un pas polaire.

