
 French
French


















MECHA
Technologie mechatronics
Les images suivantes représentent les états successifs de fonctionnement du système d’actionnement commun pour les pinces, les actionneurs et les plaques électriques rotatives. 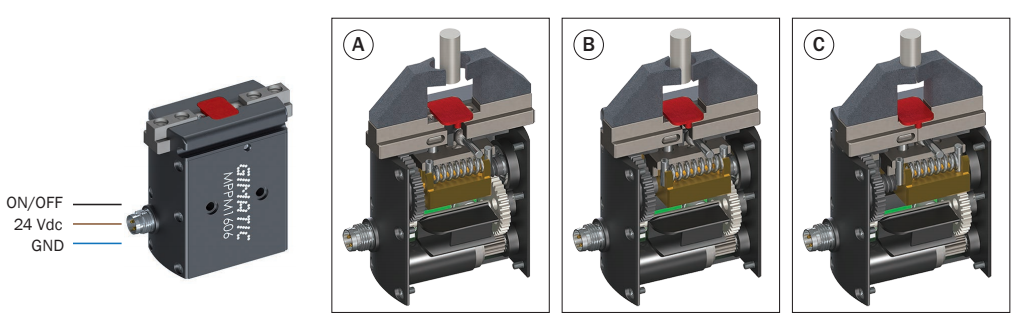
Les mêmes états sont également identifiables sur le profil du courant absorbé par le moteur.
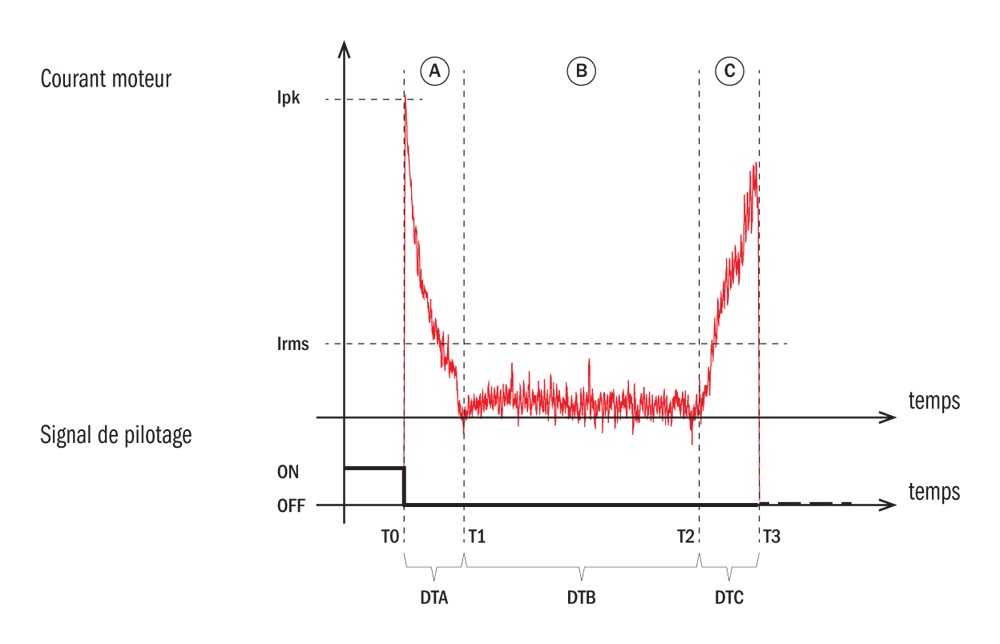
Description du fonctionnement
Au temps T0, le signal de pilotage passe de ON à OFF et commande la fermeture des mâchoires. Durant la période DTA, le moteur démarre la rotation et entraîne dans la phase A l’extension du ressort initialement comprimé. Durant la phase B, le ressort a atteint sa longueur maximale et les mâchoires exécutent un mouvement à vitesse constante jusqu’au contact avec la pièce au temps T2.
Durant la phase 3, les mâchoires sont en contact avec la pièce et la compression du ressort débute.
Au temps T3, le moteur termine sa rotation et, grâce au système de transmission irréversible, la prise est maintenue, y compris en cas de panne d’alimentation, jusqu’à la commande d’ouverture des mâchoires (état ON)

Versions PNP/NPN
Les pinces sont disponibles en version standard avec entrée type PNP et en version N avec entrée type NPN.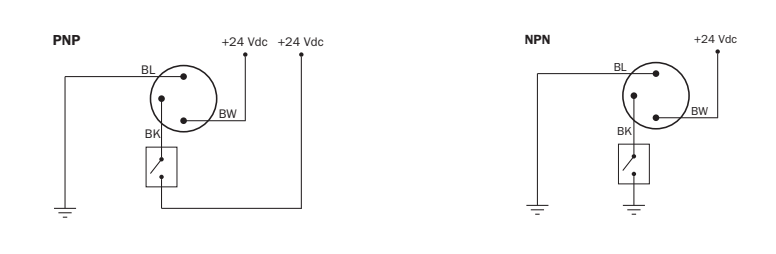
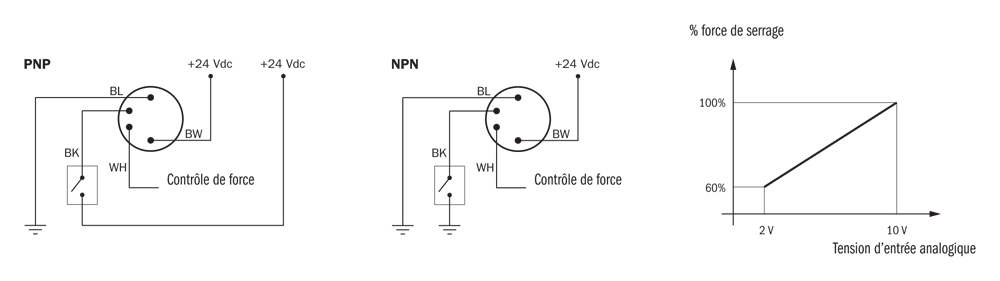
Contrôle de force (versions avec 4 broches)
Parmi les modèles à connecteur M8 à 4 broches, il existe des versions avec un canal d’entrée analogique. En modifiant la tension de référence sur l’intervalle 2÷10 V il est possible de régler la force de prise. Une valeur de tension inférieure à 2 V empêche le fonctionnement du dispositif et permet la création de logiques de sécurité de la machine.
Sortie pic
Parmi les modèles avec connecteur M8 à 4 broches, il existe des versions avec un canal de sortie numérique qui est activé automatiquement par le dispositif une fois que les griffes exercent la force de prise. De cette manière, on obtient la fonctionnalité d’un capteur de proximité intégré qui peut fonctionner indépendamment de la position finale des griffes et donc sans aucun réglage.
Sortie de position et BUS de terrain
Des versions avec un canal de sortie dédié à la mesure de la position des griffes (numérique et/ou analogique), ainsi que des versions prévues pour la communication basée sur BUS de terrain numérique seront bientôt disponibles.


