End Of Arm Tooling (Unelte de capăt)
Ce înseamnă EOAT?
Reprezintă cadrul (cu toate uneltele necesare) montat pe robotul utilizat pentru descărcarea mașinii de turnare prin injecție.
Sarcinile acestuia sunt:
- să scoată piesa turnată din matriță;
- să o prindă ferm;
- să separe piesa turnată de culee;
- să prindă culeea după tăiere;
- să lase culeea în mașina de reciclare;
- să descarce piesa turnată pe un palet sau pe un transportor.

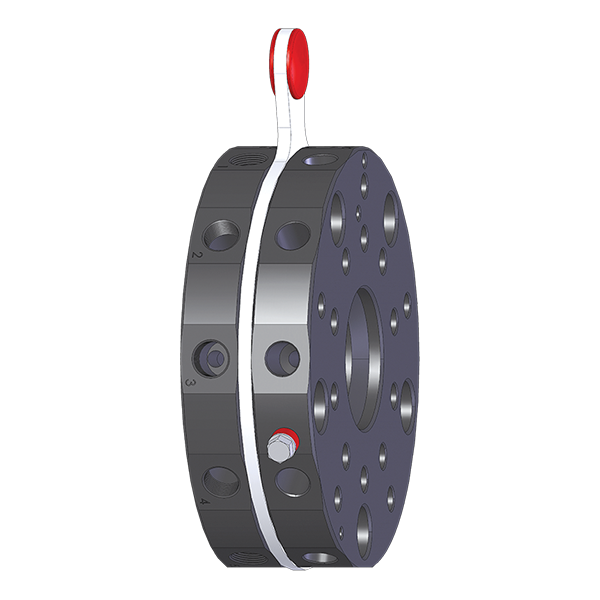
End of Arm
QC
- Cuple rapide pentru conexiuni ușoare între robot și EOAT.
- 15 modele și 5 mărimi până la 75 kg sarcină utilă.
- Conexiuni pneumatice și electrice.
- Supape de aer.
- LOQC pentru blocare de siguranță.
- RFID pentru identificarea EOAT.
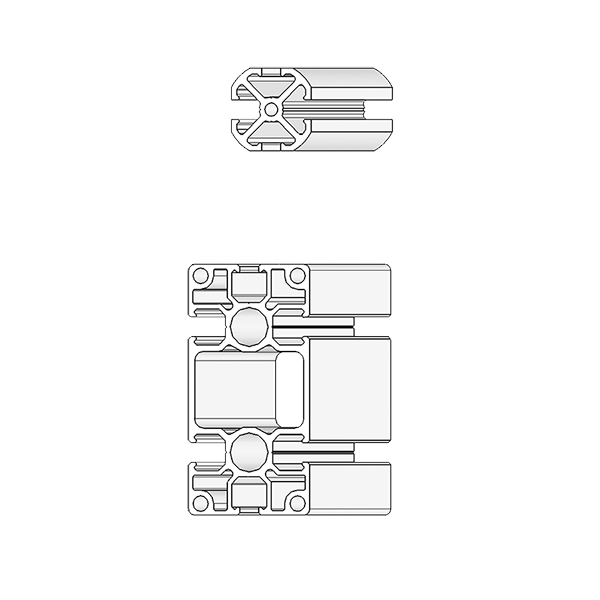
EMB
- Profiluri din aluminiu pentru încadrarea EOAT.
- Piuliță specială pentru o fixare rigidă.
- Anodizare neagră și argintie.
- Formă pătrată sau rotundă.
- 15 mărimi.
MFI
- Bride pentru montarea actuatorului pe cadru.
- Peste 500 de coduri pentru o poziționare perfectă.
Tooling (EOAT)
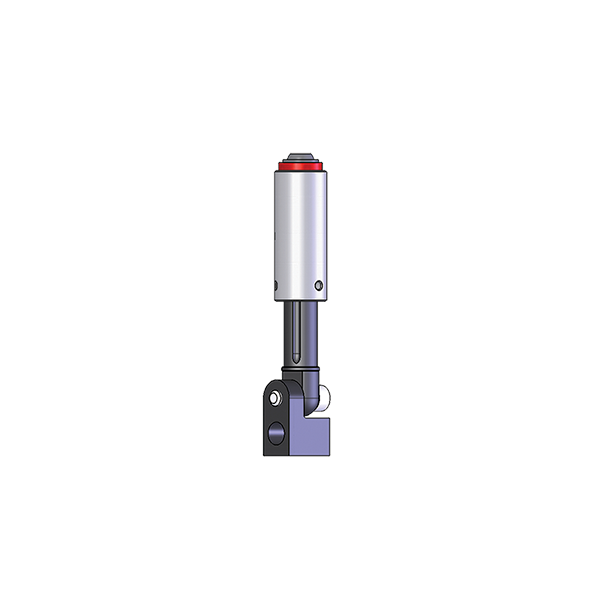
Clești
- Clești pneumatici cu unul sau două degete.
- Clește de expansiune.
- Pentru susținerea piesei..
- Pentru susținerea culeei
- Pentru poziționare precisă a inserției
- Peste 200 de coduri EOAT dedicate.
VS
- Suporturi de ventuză.
- Suspensii cu arc intern.
- Rotativ sau non-rotativ.
- Materiale din cauciuc fără marcare.
- Peste 500 de coduri PLASTICE dedicate.
GN
- Clești pentru îndepărtare piesă turnată.
- Stil foarfecă sau ghilotină.
- 10 mărimi de clește.
- Lame interschimbabile.
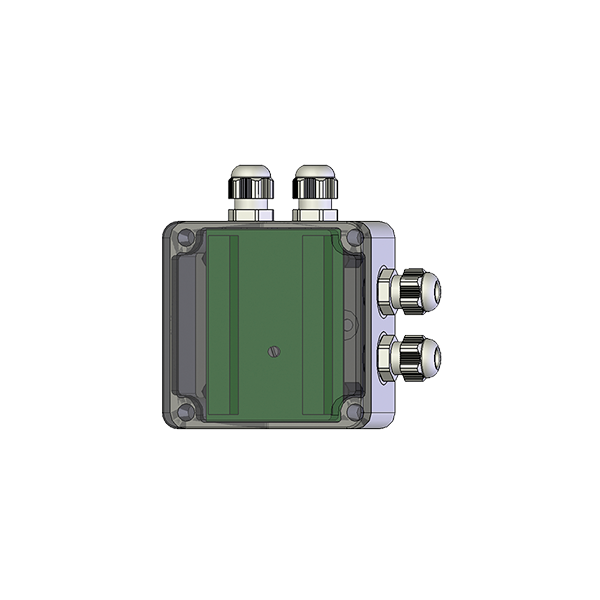
SB
- Cutii de senzor pentru procesarea semnalelor de la actuatori
PDF End Of Arm Tooling (Unelte de capăt)

 Romanian
Romanian