
 Romanian
Romanian


















MECHA
Tehnologie mecatronică
Imaginile de mai jos ilustrează secvența stării de operare a sistemului de acționare distribuită între clești, actuatoare și mese de indexare electrice. 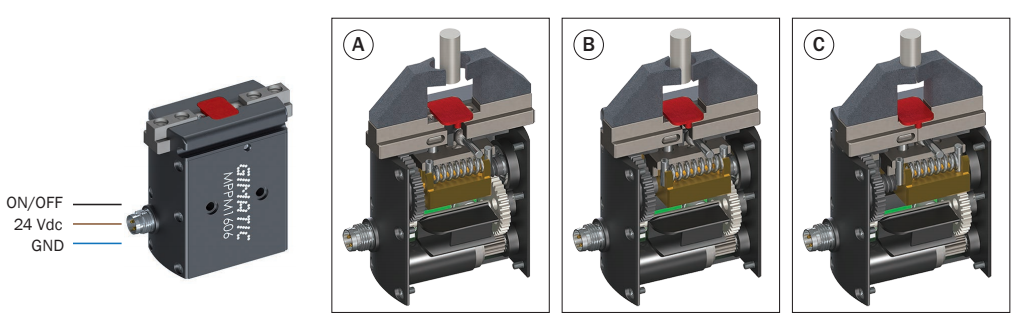
Stările pot fi de asemenea identificate în profilul de absorbție al puterii motorului.
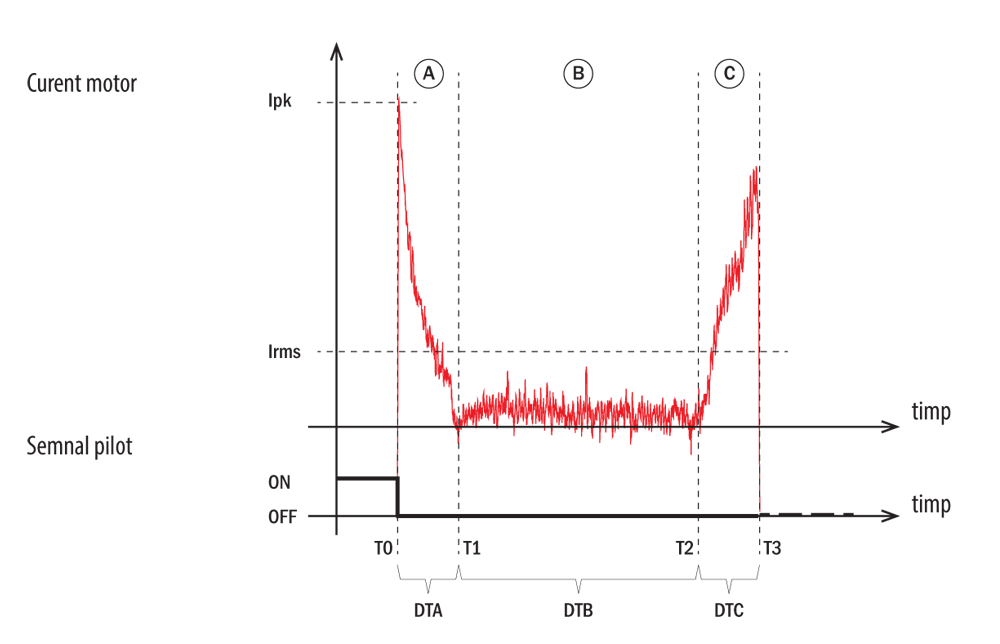
Descriere operare
La momentul T0, semnalul pilot comută din starea PORNIT (ON) în OPRIT (OFF), închizând fălcile. Pe durata DTA, motorul începe să funcționeze, în timpul fazei A acesta cauzează destinderea arcului care a fost inițial compresat. În faza B, arcul a atins lungimea sa destinsă, iar fălcile se mișcă la viteză constantă până când intră în contact cu piesa de lucru la momentul T2.
Pe durata fazei 3, fălcile sunt în contact cu piesa de lucru și începe compresia arcului.
La momentul T3, motorul se oprește din funcționare, iar sistemul de transmisie ireversibil menține prinderea chiar și când nu este alimentat cu energie, până când este dată următoarea comandă de deschidere a fălcilor (stare PORNIT (ON)).

Versiuni PNP/NPN
Cleștii sunt disponibili în versiunea standard cu intrare PNP și în versiunea N cu intrare NPN.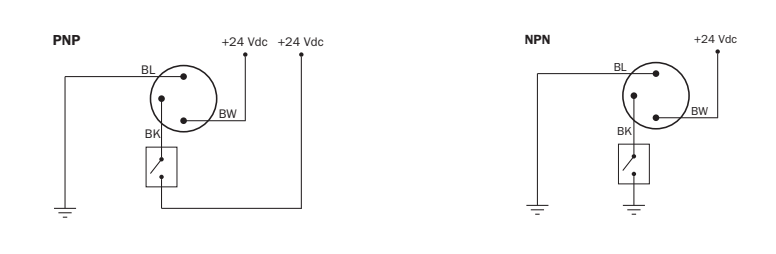
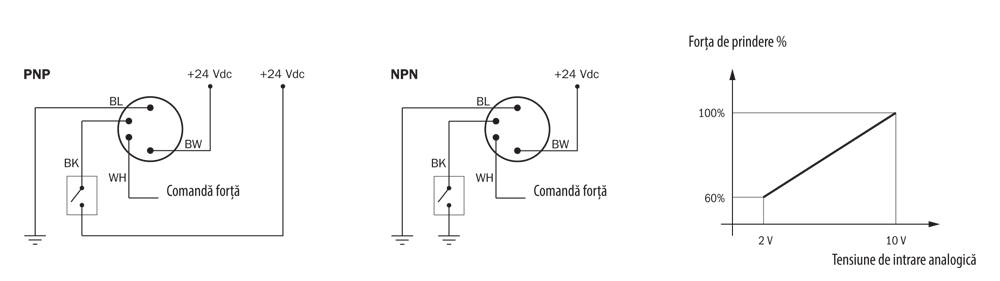
Comandă forță (versiuni 4 pini)
În gama de modele cu conector M8 cu 4 pini, unele versiuni sunt disponibile cu un canal de intrare analogic. Prin schimbarea tensiunii de referință în gama 2÷10 V, forța de prindere poate fi reglată. O valoare a tensiunii mai mică de 2 V va împiedica operarea dispozitivului, permițând crearea sistemului logic de siguranță al mașinii.
Ieșire de vârf
În gama de modele cu conector M8 cu 4 pini, unele versiuni sunt disponibile cu un canal de ieșire analogic care este acționat automat de dispozitiv când fălcile exercită forța de prindere. Acesta va funcționa ca un senzor de proximitate integrat care poate opera independent de poziția finală a fălcilor și astfel fără reglare.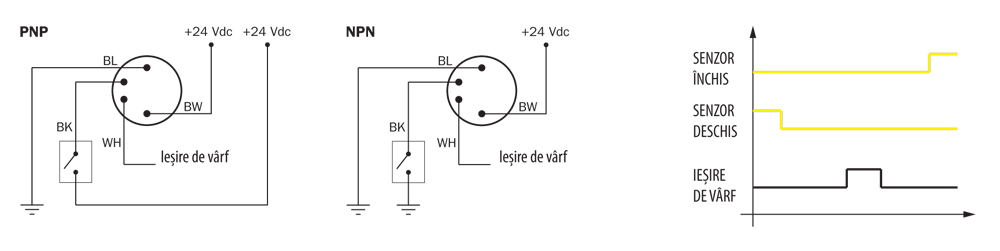
eșire poziție și Bus Control
Versiunile cu un canal de ieșire (digital și/sau analogic) dedicat măsurării poziției fălcilor vor fi disponibile în curând, la fel ca versiunile stabilite pentru comunicare bazată pe Bus Control digital.


