
 Spanish
Spanish


















Glosario
Fuerza de apriete total
Valor medio de fuerza en las mordazas.
Par de apriete total
Valor medio de par en las mordazas.
Par de rotación
Valor medio de par en el platillo rotatorio.
Carrera
Valor medio de la carrera total de las mordazas.
Frecuencia
Valor medio de frecuencia de ciclo compuesto por apertura, cierre y tiempo de enfriamiento para evitar el calentamiento excesivo del motor. Este valor se determina sin carga conectada con el actuador.

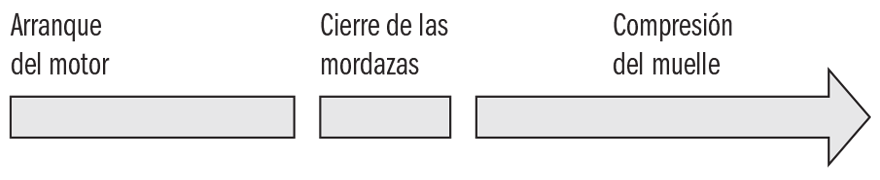
Tiempo de cierre de la mordazas
Tiempo del movimiento mecánico de cierre de las mordazas entre el arranque del motor y la compresión del muelle.

Tiempo de trabajo de la pinza
Tiempo total de arranque del motor, movimiento de mordazas y compresión del muelle.
Ciclo de trabajo
Relación entre el tiempo operativo del actuador y el tiempo total del ciclo, incluido el tiempo de enfriamiento.

Tensión de alimentación
Es la tensión continua necesaria para alimentar el actuador.
Corriente de pico
Corriente máxima de alimentación del motor limitada por la tensión de BUS, por la resistencia eléctrica del motor (con temperatura prefijada) y por factores de fabricación. Para los motores lineales, los actuadores lineales eléctricos y las guías lineales eléctricas representa el valor máximo rms.
Potencia del motor sin escobillas
Máxima potencia mecánica del motor sin escobillas.
Conexión
Conector circular metálico estándar M8x1, 3 polos.
Señal de entrada apertura/cierre
Lógica a colector abierto accionable con +24Vdc y GND.
Temperatura de trabajo
Temperatura ambiente que representa las condiciones nominales de funcionamiento, limitada por las características de los materiales y por la viscosidad del lubricante.
Grado de protección
Código que indica el nivel de protección del aparato eléctrico contra la penetración de cuerpos sólidos y líquidos.
Nivel de ruido
Valor fundamental relativo al nivel de ruido en decibelios para zonas principalmente industriales.
Masa
Peso total del actuador, incluido el motor sin escobillas.
Certificado Cámara Blanca IPA
Certificación ISO14644-1 para la utilización del actuador en sala blanca con pruebas realizadas en el Fraunhofer Institute.
Certificado CE
Compatibilidad electromagnética (EMC) en conformidad con las normas EN61000-06-2:2005; EN61000-6-3:2007; EN61000-6-4:2007.
Tensión de BUS
Tensión de pico suministrada por el accionamiento del motor.
Fuerza de pico
Fuerza suministrada por el motor con la corriente de pico.
Constante de fuerza
Constante de proporcionalidad directa entre la corriente de alimentación y la fuerza suministrada por el motor.
Cogging
Interacción entre los imanes permanentes y el estator que genera una fuerza periódica resistente en cada polo.
Fuerza continua
Fuerza que puede suministrar el motor durante un tiempo indefinido sin sobretemperatura.
Corriente continua
Corriente con que el motor puede alimentarse durante un tiempo indefinido y que comporta alcanzar la temperatura interna con el valor límite prefijado (sin sobretemperatura).
Resistencia de fase
Valor de resistencia eléctrica equivalente medida en los terminales de una fase a una temperatura preestablecida.
Inductancia de fase
Inductancia eléctrica equivalente medida en los terminales de una fase.
Constante BEMF
Fuerza contra electromotriz generada por cada fase cuando el motor se mueve a 1 m/s.
Resistencia térmica
Valor de sobrecalentamiento por cada vatio de potencia producido por el motor.
Constante térmica
Tiempo empleado por el motor para alcanzar la temperatura de régimen.
Temperatura máxima de fase
Temperatura máxima que pueden alcanzar los bobinados.
Valor PTC
Valor de resistencia del sensor de temperatura.
Tensión máxima PTC
Tensión de alimentación máxima que se puede aplicar a los terminales de la termorresistencia PTC.
Transductor de retroacción
Dispositivo para detectar y medir la posición recíproca motorvástago.
Salida del circuito
Tipo de señal generada por el transductor de retroacción hacia el controlador. ABZ: señal de salida de onda cuadrada. SIN/COS: señal de salida sinusoidal. HALL: salida a baja resolución para la sincronización del motor.
Señal de salida
Estándar de comunicación utilizado.
Consumo de corriente
Consumo máximo de energía del sensor.
Velocidad de trabajo
Velocidad máxima a la cual el sensor es capaz de enviar información correcta sobre la posición.
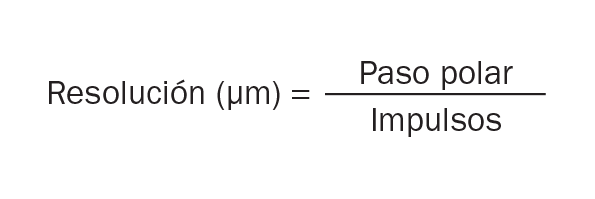
Resolución
Parámetro que indica la exactitud de la detección de los desplazamientos mecánicos.
Repetitividad
Expresa la correlación entre una serie de medidas en condiciones de medición invariables.
Paso polar
Distancia lineal entre dos polos magnéticos iguales consecutivos (Norte > Norte; Sur > Sur).
Impulsos / Sinusoide
Número de impulsos u ondas sinusoidales en un paso polar.

