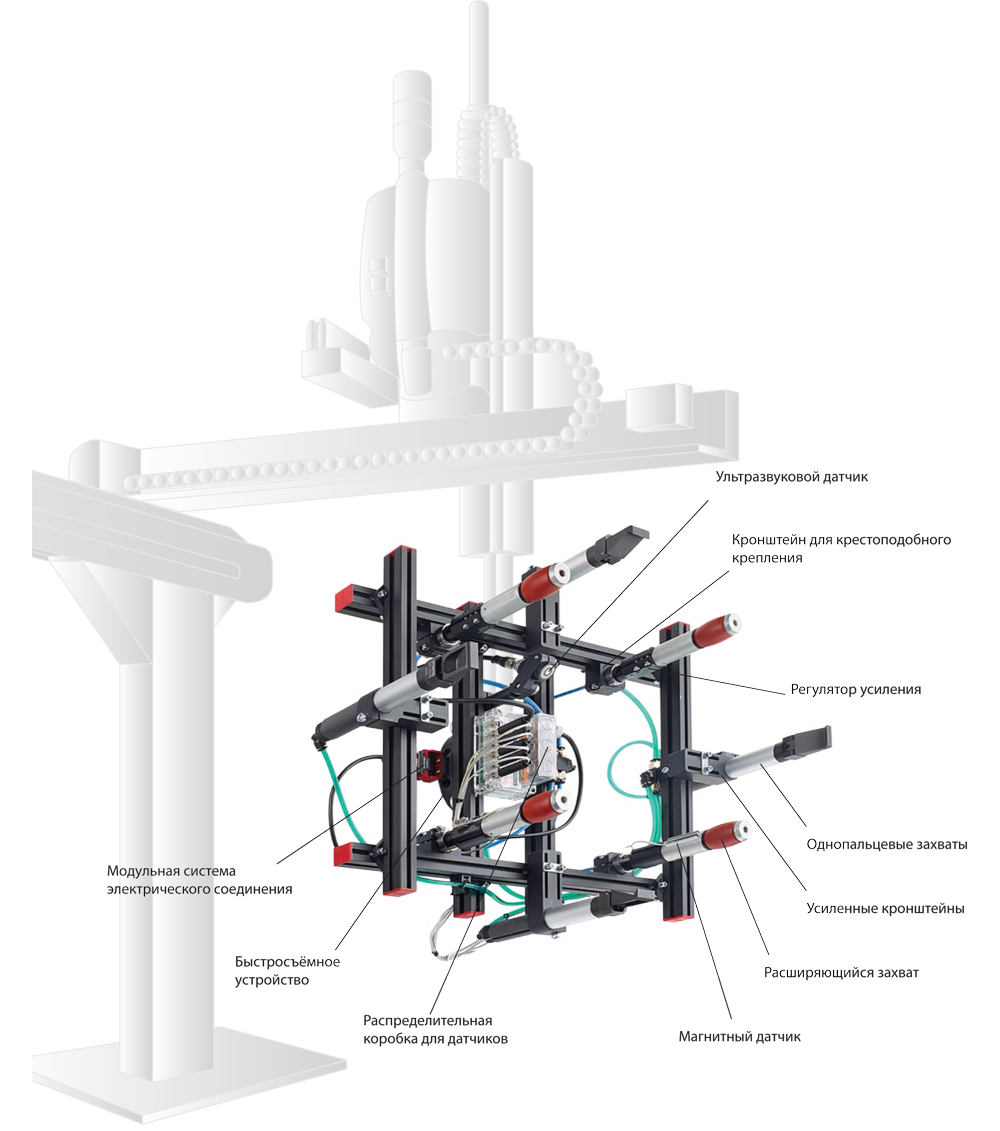
Захватное Приспособление Для Робота
Что такое ЗПДР?
Это рама (со всеми необходимыми инструментами), установлена на роботе, для разгрузки станков для литья пластмасс.
Его функции следующие:
- вынимать со станка отлитую в форму часть;
- крепко её удерживать;
- отделять её от литника;
- захватывать литник после резки;
- выгружать литник в переработчик материалов;
- помещать очищенную часть на паллет или конвеерную ленту.
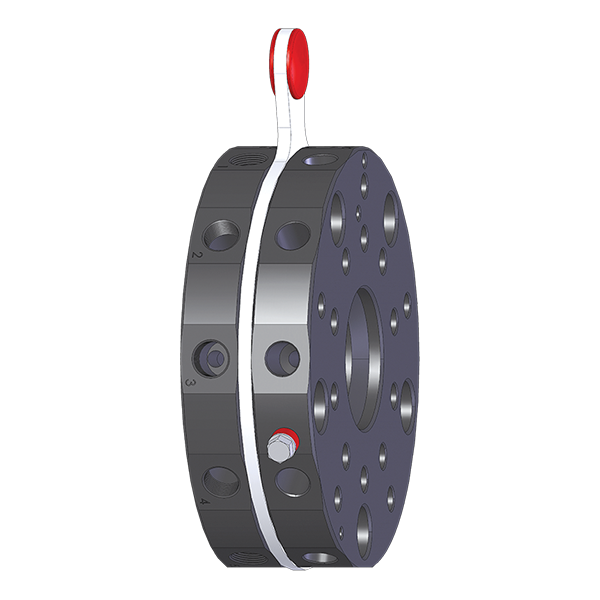
End of Arm
QC
- Быстросъёмное устройство для простого соединения между роботом и ЗПДР
- 15 моделей и 5 размеров для грузоподьёмности до 75 кг.
- Пневматические и электрические соединения.
- Пневмоклапаны.
- LOQC для безопасной фиксации.
- RFID для опознания ЗПДР.
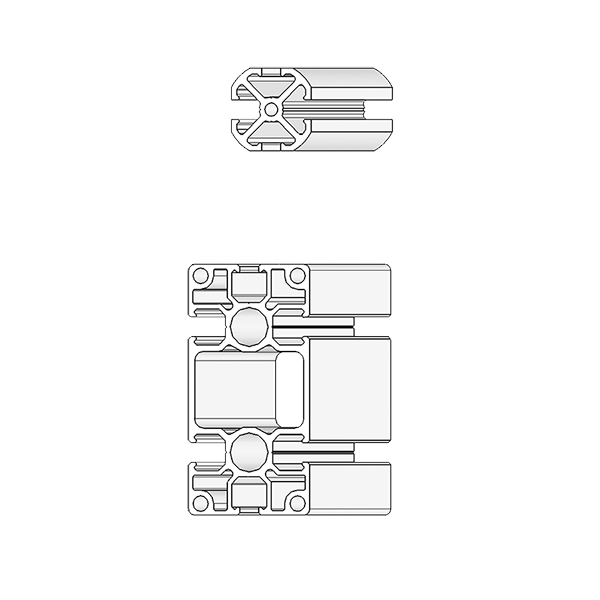
EMB
- Профили из алюминия для структур ЗПДР.
- Специальные гайки для лучшего закрепления.
- Чёрное и серебряное анодирование.
- Круглая и прямоугольная форма.
- 15 размеров.
MFI
- Кронштейны для монтажа приводов на раму.
- Более чем 500 кодов для идеального размещения.
Tooling (EOAT)
Захваты
- Пневматические однопальцевые и двухпальцевые захваты.
- Расширяющиеся захваты.
- Для удержания части.
- Для удержания литника.
- Для аккуратного расположения закладной.
- Более чем 200 кодов для ЗПДР.
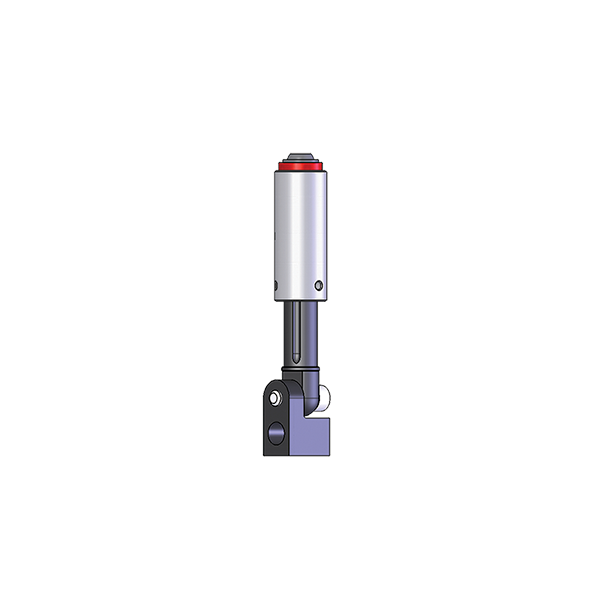
VS
- Держатели присосок.
- Подвеска с внутренней пружиной.
- Поворотные и неповоротные.
- Не оставляющие следов резиновые материалы.
- Более чем 500 кодов для ПЛАСТИК.
GN
- Кусачки для удаления литника.
- Форма ножниц или гильотины.
- 10 размеров кусачек в распоряжении.
- Взаимозаменяемые лезвия.
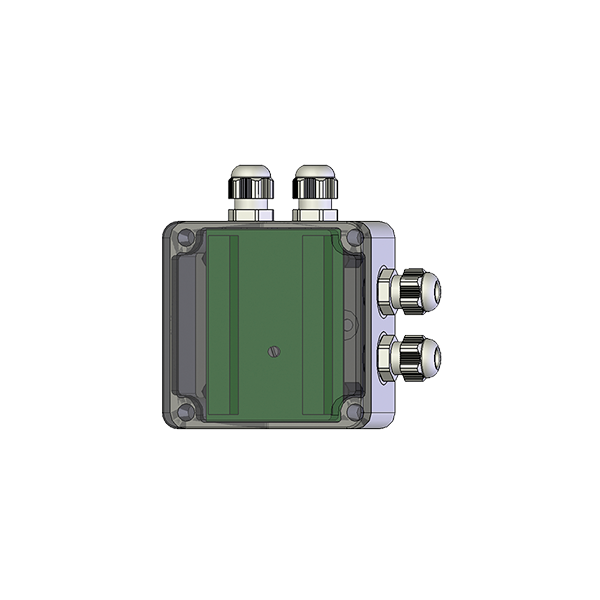
SB
- Блоки датчиков для обработки сигналов от приводов.
PDF Захватное Приспособление Для Робота

 Russian
Russian