Korean
Korean


















MECHA
기계전자공학 기술
아래 이미지는 그리퍼, 액츄에이터 및 전기 인덱싱 테이블에 의하여 공유되는 구동 시스템의 작동 상태 시퀀스를 표시해 줍니다. 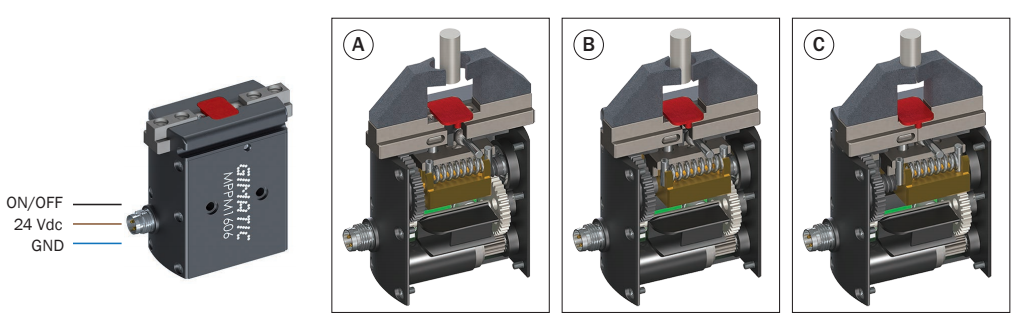
이러한 상태는 또한 모터의 전력 흡수 프로파일에서 식별할 수 있습니다.

작동 설명
시간 T0에서, 파일럿 신호 스위치는 ON에서 OFF 상태로 변환되며, 조는 폐쇄됩니다. DTA 시간 동안, 모터가 작동을 시작합니다; A상 중, 처음에 압축되었던 스프링이 확장하게 됩니다.
B상에서, 스프링은 자유 길이에 도달하며, 조는 시간 T2에서 공작물과 닿을 때까지 일정한 속도로 움직입니다.
3상 동안, 조는 공작물과 닿게 되며, 스프링의 압축이 시작됩니다. 시간 T3에서, 모터는 작동을 중지하고, 한방향으로 작동하는 전송 시스템은 전력이 공급되지 않더라도 다음 조 오픈 명령을 받을 때까지 (ON 상태) 그립을 유지합니다

PNP/NPN 버전
그리퍼는 PNP 출력이 있는 표준 버전 및 NPN 출력이 있는 N 버전에서 사용가능합니다.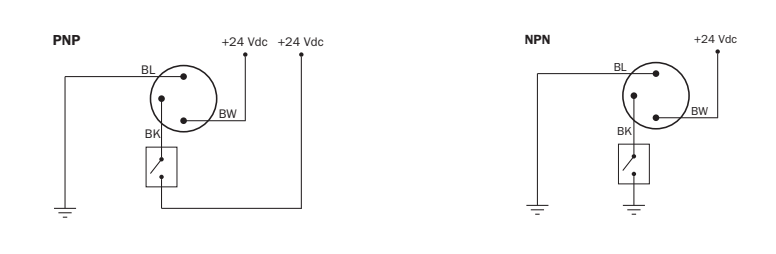
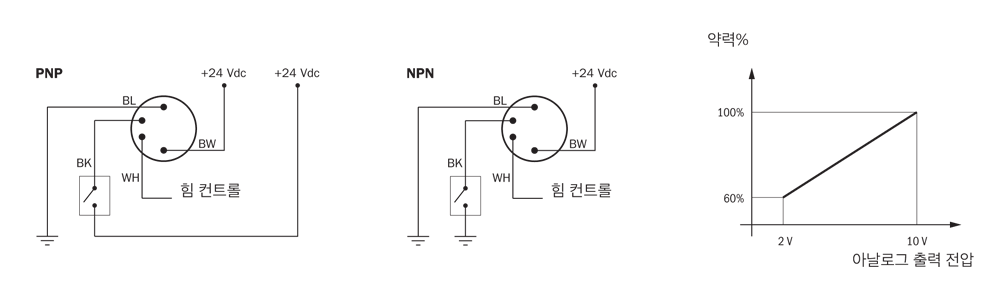
힘 컨트롤 (4-핀 버전).
4-핀 M8 커넥터가 있는 모델 범위 내에서, 일부 버전은 아날로그 입력 채널과 함께 사용할 수 있습니다. 2÷10 V 범위에서 기준 전압을 변경하여 약력을 조절할 수 있습니다. 2 V 보다 낮은 전압 값은 기계 안전 로직의 생성을 허용하면서, 장치 동작을 억제할 것입니다.
피크 출력
44-핀 M8 커넥터가 있는 모델 범위 내에서, 일부 버전에서는 조(jaws) 가 약력을 능가할 경우, 장치에 의해 자동으로 활성화되는 디지털 출력 채널과 함께 사용할 수 있습니다. 이는 조(jaws)의 최종 위치와는 달리 독립적으로 작동할 수 있는 통합된 근접 센서와 같이 작동할 것입니다. 그러므로 조정할 필요가 없습니다.
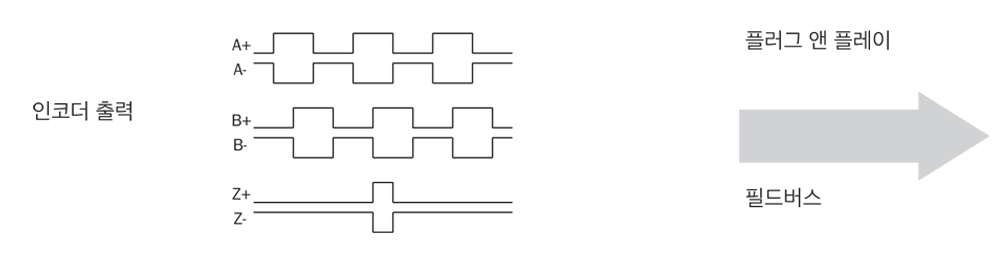
위치 출력 및 필드버스
조(jaw) 위치 측정용 출력 채널(디지털 및/또는 아날로그)이 있는 버전은 디지털 필드버스를 기반으로 커뮤니케이션하도록 세팅된 버전과 함께 곧 사용할 수 있을 것입니다.