
 Japanese
Japanese


















MECHA
メカトロニクス技術
以下の画像は、グリッパ、アクチュエータ、および電動インデック ス・テーブルで共有される駆動システムの動作状態シーケンスを 示すものです。 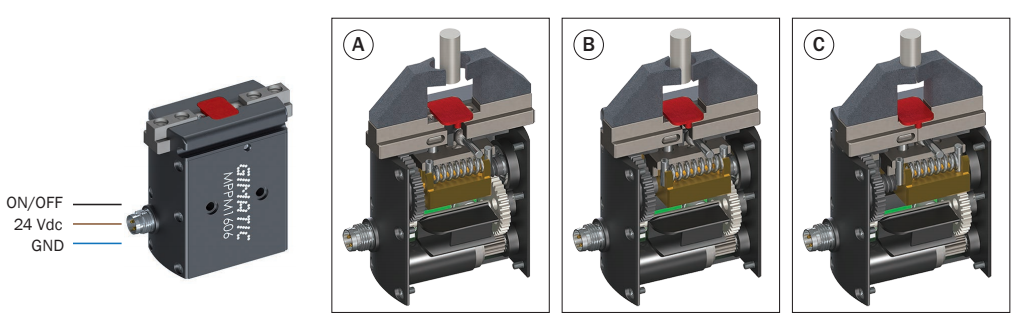
これらの状態は、モーターの電力吸収プロファイルでも識別でき ます。

動作の説明
時間T0で、パイロット信号はONからOFF状態に切り替わり、ジョー を閉じます。 DTA時間の間に、モーターがスタートします。それによりフェーズA の間に、最初は圧縮されていたスプリングの伸びが生じます。 フェーズBでは、スプリングはフリーの長さに達し、ジョーは時間 T2でワークピースに接触するようになるまで一定の速度で動き ます。
フェーズ3の間に、ジョーはワークピースに接触し、スプリングの圧 縮が開始します。
時間T3で、モーターは動作を停止し、電源が入れられていない場 合、ジョーを開ける次のコマンドが与えられるまで(ON状態)、不 可逆的トランスミッションシステムはグリップを均等に維持しま す。 モーター電流 パイロット信号 時間 時間 バー

PNP/NPNバージョン。
グリッパは、PNP入力付きの標準バージョン、およびNPN入力付き のNバージョンで入手可能です。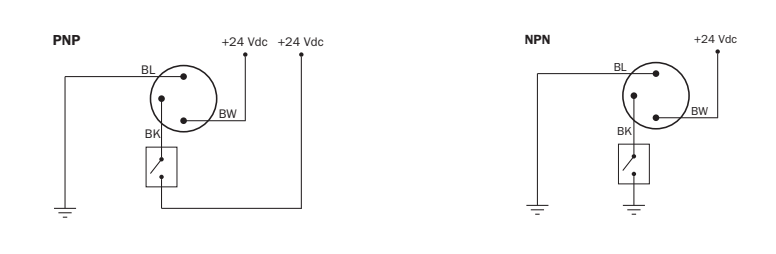
力制御 (4ピンバージョン)。
4ピンM8コネクタ付きの機種の範囲には、アナログ入力チャネル 付きのバージョンもあります。参照電圧を2÷10 Vの範囲で変化 させて、グリップ力を調整できます。2 Vよりも低い電圧ではデバイ スの操作ができなくなり、それによりマシンの安全ロジックが形 成されます。

ピーク出力
4ピンM8コネクタ付きの機種の範囲には、ジョーがグリップ力を 働かせる際にデバイスによって自動的に有効にされるデジタル出 力チャネル付きのバージョンもあります。 このバージョンは、ジョーの最終位置によらずに操作できて、その ため調整が不要な内蔵式近接センサーのように作動します。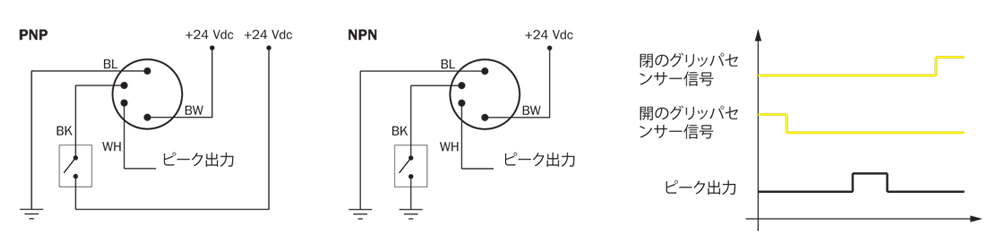
位置出力およびフィールドバス
ジョー位置測定用の専用出力チャネル (デジタルおよび/またはア ナログ) 付きバージョンが、デジタルフィールドバスに基づいた通 信用に設定されたバージョンとともに近々発売されます。


