Hungarian
Hungarian


















MECHA
Mechantronikai technológia
Az alábbi ábra a megfogók, az aktuátorok és a forgóasztal közös hajtásrendszerének további működési fázisait ábrázolja. 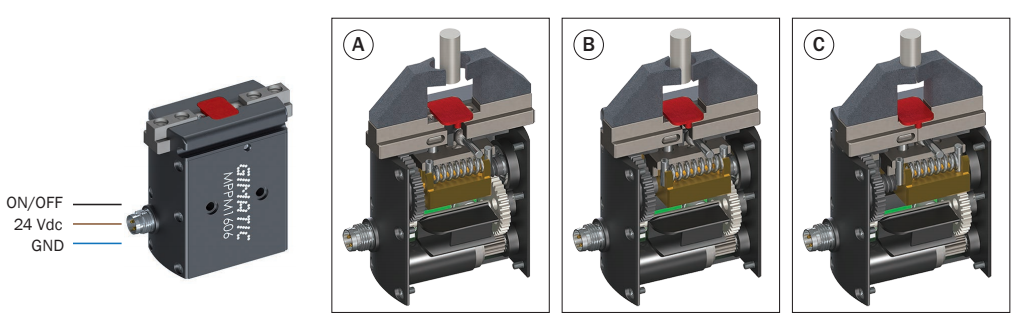
Ezek a státuszok a motor teljesítményfelvételi profiljában is beazonosíthatóak.

Működési leírás
T0 időnél a pilot-jel ON-ról OFF-ra vált át és a pofák összezárnak. A DTA időtartamban a motor működni kezd, az A fázisban ez a kezdetben összenyomott állapotú rugó kinyúlását okozza. A B fázisban a rugó eléri teljes szabad hosszát és a pofák állandó sebességgel mozognak a munkadarabbal T2 időnél történő érintkezésig.
A 3 fázisban a pofák a munkadarabbal érintkeznek és kezdetét veszi a rugó összenyomódása.
T3 időnél a motor forgása leáll és a visszafordíthatatlan hajtásrendszer a fogást áramellátás hiányában is megtartja a pofa nyitási parancs (ON státusz) elrendeléséig.

PNP/NPN változatok
A megfogók alapváltozatban PNP bemenettel, az N verzióban NPN bemenettel rendelkeznek.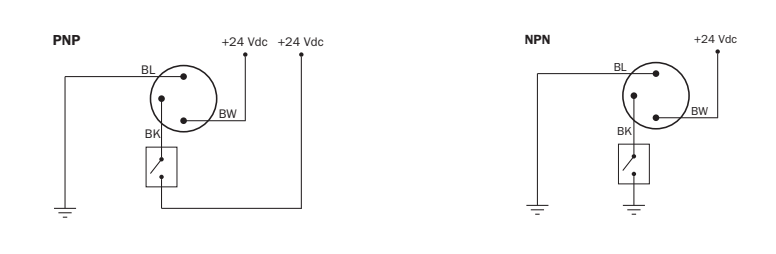
Erőszabályozás (4 pólusú verziók)
A 4 pólusú M8 csatlakozóval rendelkező modellek közül egyes változatok analóg bemeneti csatornával is elérhetőek. A szorítóerő a referencia feszültség 2÷10 V tartományon belüli beállításával szabályozható. A 2 V alatti feszültségérték meggátolja a berendezés működését és berendezés biztonsági logikák létrehozását teszi lehetővé. 
Csúcs kimenet
A 4 pólusú M8 csatlakozóval szerelt modellek közül egyes változatok egy, a berendezés által a szorítóerő kifejtése közben automatikusan engedélyezett digitális kimeneti csatornával is elérhetőek. Ez egy, a pofák végpozíciójától függetlenül, tehát beállítási nélküli beépített közelségi érzékelő módjára működik.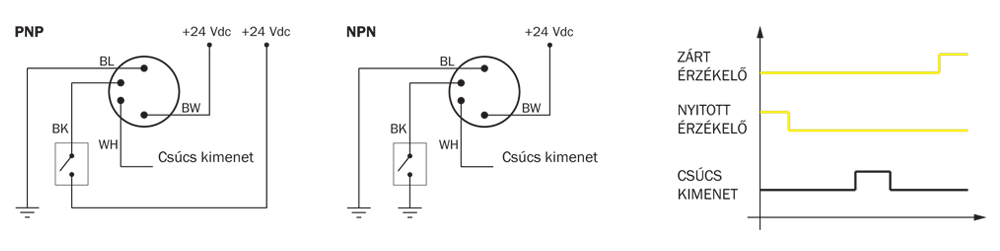
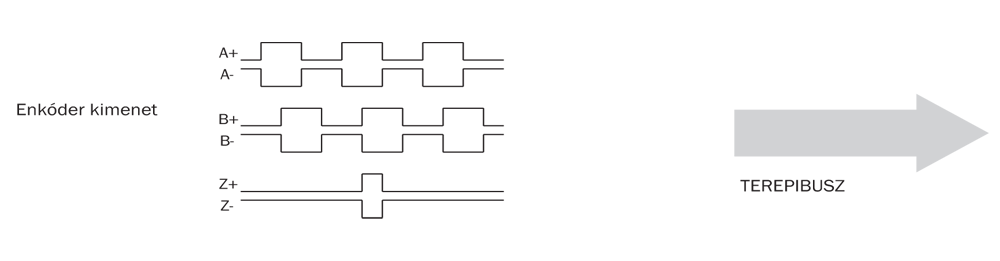
Pozíció kimenet és terepibusz
A pofapozíció észlelésnek dedikált (digitális és/vagy analóg) kimeneti csatornával rendelkező változatok, ahogy a digitális terepibuszos kommunikációra beállított változatok is hamarosan elérhetőek lesznek.