
 Italiano
Italiano


















Glossario
Forza di serraggio totale
Valore medio di forza erogata dalle griffe.
Coppia di serraggio totale
Valore medio di coppia erogata dalle griffe.
Coppia di rotazione
Valore medio di coppia erogata dal piattello rotante.
Corsa
Valore medio della corsa totale delle griffe.
Frequenza
Valore medio di frequenza ciclo composto da apertura, chiusura e tempo di raffreddamento per evitare sovratemperature del motore. Questo valore è determinato senza carico collegato all’attuatore.

Tempo chiusura griffe
Tempo del solo movimento meccanico di chiusura griffe dopo lo start motore e prima della compressione molla.
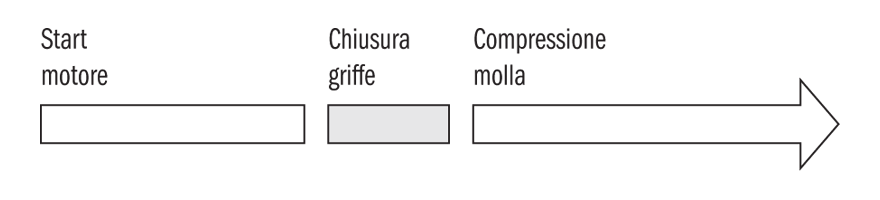
Tempo di lavoro pinza
Tempo totale di start motore, movimentazione griffe e compressione molla.

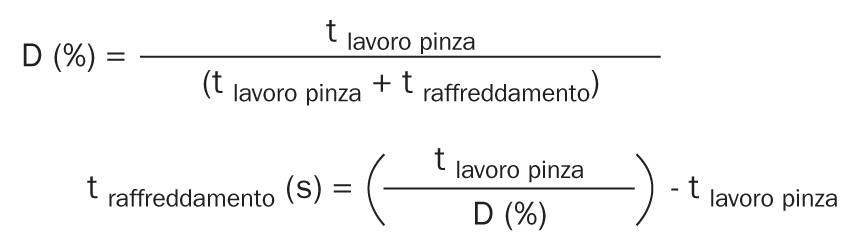
Ciclo di lavoro
Rapporto tra il tempo operativo dell’attuatore ed il tempo totale di ciclo che comprende anche il tempo di raffreddamento.
Tensione di alimentazione
Tensione continuativa necessaria per alimentare l’attuatore
Corrente di picco
Corrente massima di alimentazione del motore limitata dalla tensione di BUS, dalla resistenza elettrica del motore (a temperatura prefissata) e da fattori costruttivi. Per i motori lineari, gli attuatori lineari elettrici e le guide lineari elettriche rappresenta il valore massimo rms.
Potenza motore Brushless
Massima potenza meccanica del motore brushless.
Connessione
Connettore circolare metallico standard M8x1, 3 poli.
Segnale d’ingresso apertura/chiusura
Logica a collettore aperto pilotabile con +24Vdc e GND.
Temperatura di esercizio
Temperatura ambiente rappresentante le condizioni nominali di funzionamento, limitata dalle caratteristiche dei materiali e dalla viscosità del lubrificante.
Grado di protezione
Codice che riassume il livello di protezione dell’apparecchiatura elettrica contro l’ingresso di parti solide e liquide.
Rumorosità
Valore fondamentale di rumorosità espresso in decibel per area prevalentemente industriale.
Massa
Massa totale dell’attuatore compreso di motore brushless.
Certificazione Camera Bianca IPA
Certifcazione ISO14644-1 per l’utilizzo dell’attuatore in camera bianca eseguita presso Fraunhofer Institute.
Certificazione CE
Compatibilità elettromagnetica (EMC) in accordo alla EN61000-06-2:2005; EN61000-6-3:2007; EN61000-6-4:2007.
Tensione di BUS
Tensione di picco erogata dall'azionamento del motore.
Forza di picco
Forza erogata dal motore con la corrente di picco.
Costante di forza
Costante di proporzionalità diretta tra la corrente di alimentazione e la forza erogata del motore.
Impuntamento
Interazione tra i magneti permanenti e lo statore che genera una forza periodica resistente ad ogni polo.
Forza continuativa
Forza erogabile dal motore con la corrente continuativa.
Corrente continuativa
Corrente con cui il motore può essere alimentato per tempo indefinito e che comporta il raggiungimento della temperatura interna al valore limite prefissato (senza sovratemperatura).
Resistenza di fase
Valore di resistenza elettrica equivalente misurata ai capi di una fase ad una temperatura prefissata.
Induttanza di fase
Induttanza elettrica equivalente misurata ai capi di una fase.
Costante BEMF
Contro-tensione generata da ogni fase quando il motore si muove a 1m/s.
Resistenza termica
Valore di surriscaldamento per ogni Watt di potenza prodotto dal motore.
Costante termica
Tempo impiegato dal motore per raggiungere la temperatura a regime.
Massima temperatura di fase
Temperatura massima raggiungibile dagli avvolgimenti.
Valore PTC
Valore della resistenza del sensore di temperatura.
Tensione massima PTC
Tensione di alimetazione massima applicabile ai capi della termoresistenza PTC.
Trasduttore di retroazione
Dispositivo per rilevare e misurare la posizione reciproca motore-slider.
Uscita circuito
Tipologia di segnale generato dal trasdutttore di retroazione verso il controllore. ABZ: segnale d’uscita a onda quadra. SIN/COS: segnale d’uscita sinusoidale. HALL: uscita a bassa risoluzione per fasatura motore.
Segnale d’uscita
Standard di comunicazione utilizzato.
Consumo di corrente
Assorbimento massimo del sensore dall’alimentazione.
Velocità di lavoro
Massima velocità alla quale il sensore riesce a fornire una corretta informazione della posizione.
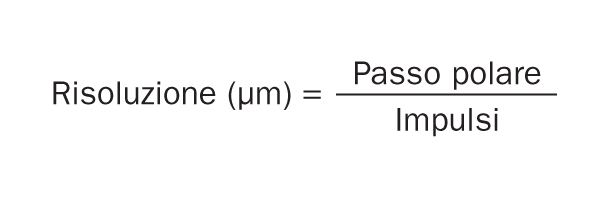
Risoluzione
Parametro che indica la precisione della rilevazione degli spostamenti meccanici.
Ripetibilità
Esprime la concordanza tra una serie di misure in condizione immutata di misura.
Passo Polare
Distanza lineare tra due poli magnetici uguali consecutivi (Nord > Nord; Sud > Sud).
Impulsi / Sinusoidi
Numero di impulsi oppure onde sinusoidali all’interno di un passo polare.

