
 Japanese
Japanese


















用語集
合計グリップ力
平均爪グリップ力。
合計グリップトルク
平均爪グリップトルク。
回転トルク
ロータリープレートに提供される平均トルク。
ストローク
合計爪ストロークの平均値。
サイクル数
開、閉およびモーターのオーバーヒートを防ぐための冷却時間か らなるサイクルでのサイクル数の平均値。 この値は、アクチュエータに負荷が接続されていない状態で計算 されます。

爪を閉じる時間
モーターが動作開始した後、バネが圧縮される前に爪を機械的に 作動させる時間。
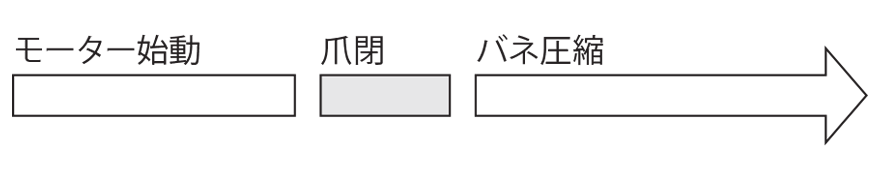
グリッパーの作動時間
モーターの動作開始、爪の作動、およびバネの圧縮の合計時間。

デューティサイクル
アクチュエータが動作状態である時間と、冷却時間を含む合計サ イクルを行うために要する時間との比率。

電源供給
アクチュエータに電源を供給するために必要な連続電圧。
ピーク電流
最大モーター供給電流で、BUS電圧、モーターの電気抵抗 (設定温 度における)、および構造要因によって制限されます。 リニアモーター、電動リニアアクチュエータ、および電動リニアガイ ドウェイについては、それは二乗平均平方根の最大値です。
ブラシレスモーターの出力
メカニカルブラシレスモーターの最大出力。
接続
標準のメタル円形 M8x1、3極コネクター。
開/閉入力信号
24VdcとGNDで駆動可能なオープンコレクター論理システム。
動作温度
公称動作条件を参照とする室温。潤滑剤の粘度と材料の特性によ って制限されます。
耐環境規格
電気的エンクロージャが付いたメカニカルケーシング内への固体 物質および水の侵入に対して提供される保護の等級。
ノイズレベル
デシベル単位での工業エリアのノイズレベル。
質量
ブラシレスモーターを含むアクチュエータの合計質量。
IPAクリーンルーム認定
Fraunhofer Instituteによって行われるISO 146444-1クリーンル ーム認定。
CE認定
EN61000-06-2:2005; EN61000-6-3:2007; EN61000-6-4:2007に 適合する電磁両立性 (EMC)。
BUS電圧
モーターの起動時に供給されるピーク電圧。
ピークの力
ピーク電流での力。
力の係数
供給電流とモーターの力出力の間の直接比例の定数。
コギング
それぞれの極で周期的な戻り止め力を引き起こす永久磁石と固 定子の間の相互作用。
連続の力
連続電流でのモーターの力出力の能力。
連続電流
無制限にモーターに供給できる電流で、その電流で最大定格内 部温度に到達します (オーバーヒートなしに)。
相抵抗
あらかじめ定められた温度において1つの相の端子間で測定され る等価な電気抵抗の値。
相インダクタンス
1つの相の端子間で測定される等価な電気インダクタンス。
BEMF定数
モーターが1 m/sで動いた時に生成する逆電圧。
熱抵抗
モーターから消散されるそれぞれのワット出力でのオーバーヒ ート。
熱定数
モーターが最大温度に到達するまでの時間。
最大相温度
最大許容巻線温度。
PTC値
温度センサー (PTC) の 抵抗値。
PTC最大電圧
PTCサーミスターの端子に印加可能な最大供給電圧。
フィードバック変換器
モーター/スライダーのそれぞれの位置をチェックして測定するた めの電子デバイス。
回路出力
フィードバック変換器によってコントローラーに対して生成される 信号のタイプ。 ABZ:方形波の増分出力 SIN/COS:正弦波のエンコーダー出力 HALL:モーターの位相整合のための低分解能のフィードバック。
出力信号
使用される通信標準。
電流消費
電源供給から提供される最大センサー電流消費。
作動速度
正しい位置情報を得るための最大センサー速度。
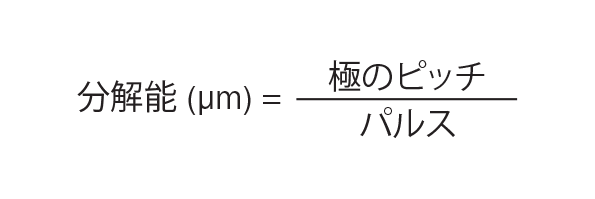
分解能
システムが実行できる最小増分ピッチ。
再現性
ルーチンの状況でシステムが同じ測定を実施して維持できる能 力。
極ピッチ
連続した同じ極間の直線距離 (N > N; S > S)。
インパルス / 正弦曲線
単一の極ピッチに含まれる増分のインパルスまたは正弦波。

